
 在线客服
在线客服 企业微信
企业微信








 [VIP第2年] 指数:4
[VIP第2年] 指数:4 通过认证
通过认证
ABB机器人617-1 Flexpendant Interface软件安装
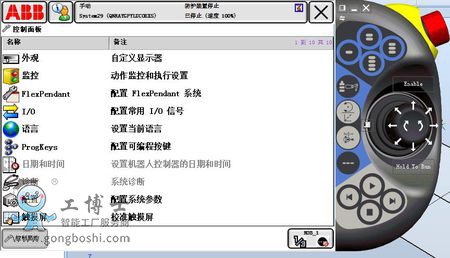
功能:在ABB机器人示教器上开发用户界面。 自定义可视化图形用户界面。 需要选配Robot Application Builder支持

1.在FlexPendant上,点击ABB菜单,然后点击校准并选择一个机械单元。
2.点击SMB内存,然后点击显示状态。显示SMB和控制器的数据及其状态。
3.如果机柜内存和SMB内存标题下显示有效字样,则说明校准数据正确。否则,SMB 板或控制器的数据必须用正确的数据替换,如下所述:
1)、例如,如果SMB板已更换,则从控制器传送数据到SMB板。机器人驱动器如果控制器已更则从SMB板传送数据到控制器。
2)、点击 SMB内存,更新,再选择要更新的数据,开始传输数据。
4.在加载校准数据后,继续更新转数计数器。
2.点击SMB内存,然后点击显示状态。显示SMB和控制器的数据及其状态。
3.如果机柜内存和SMB内存标题下显示有效字样,则说明校准数据正确。否则,SMB 板或控制器的数据必须用正确的数据替换,如下所述:
1)、例如,如果SMB板已更换,则从控制器传送数据到SMB板。机器人驱动器如果控制器已更则从SMB板传送数据到控制器。
2)、点击 SMB内存,更新,再选择要更新的数据,开始传输数据。
4.在加载校准数据后,继续更新转数计数器。










