一种大型机器人地轨设备
技术领域
本发明涉及地轨设备领域,具体为一种大型机器人地轨设备。
背景技术
随着国家的大力支持,科技的不断创新,工业自动化智能制造快速发展,自动化设
备逐渐代替了传统的人工劳动,设备也不断的升级,进行设备互联化、生产智能化等转型升
级。目前,制造业中比较常见的是一种流水线形式的自动化生产线,通过使用机器人、机械
手代替人工操作,甚至在更大的区域内进行搬运或加工,因此,需要对机器人的运行轨道进
行预先设置,使得机器人能够按照设定的运动轨道自动运行。

目前机器人七轴地轨设备已经广泛应用到智能制造领域,随着人力成本的逐步提
高,机器人的应用前景宽广,第七轴作为机器人应用的辅助设备也得到广泛的使用,国内外
生产厂家很多,但都已常用的机器人型号为主,大型机器人的第七轴地轨设备的开发由于
成本较高市场应用少而一直没有得到量产,即使机器人制造商也不提供标准的产品;而且
目前的机器人地轨大多采用钢结构焊接框架,对于比较长的地轨,无论是加工、运输、安装、
拆卸等操作难度大、不方便且成本高。
为实现上述目的,本发明提供如下技术方案:一种大型机器人地轨设备,包括地轨
机构、滑动机构与控制系统,所述地轨机构置于地面上,地轨机构包括多个主体框架,多个
主体框架端部相接串联成地轨机构;所述主体框架具有地轨支撑座与支撑型材,支撑型材
包括支撑架板与支撑筋,支撑架板两端部固装连接座,支撑架板内侧固装有支撑筋,且支撑
筋呈M形状;所述地轨支撑座沿地面间隔设置,地轨支撑座端部通过连接螺栓固接连接座;
所述滑动机构置于地轨机构上部,滑动机构包括直线导轨、齿条、滑块、驱动托盘与驱动结
构,直线导轨、齿条互相平行且沿支撑型材的长度方向分布,直线导轨上方间隔设有滑块,
且滑块与所述直线滑轨之间滑动连接。
优选的,支撑架板侧端部间隔开设有若干加强孔,且加强孔呈椭圆状。
优选的,驱动托盘置于直线滑轨上且其端部与滑块连接,驱动托盘上安装有驱动
机构,驱动机构包括横移驱动电机与齿轮,横移驱动电机输出轴端连接齿轮,且齿轮与齿条
啮合,其带动驱动托盘沿直线滑轨长度方向移动。
优选的,驱动托盘上还装设有电缆拖链,电缆拖链外设防护套,电缆拖链内设间隔
分布有温湿度传感器,且温湿度传感器通过无线连接控制系统,温湿度传感器用于对拖链
内部进行温湿度监测,并传输给控制系统。
优选的,所述控制系统包括控制模块、处理模块与报警模块,控制系统可接收温湿
度监测信息,并进行监控,防止电缆在高温和潮湿状态下造成损害的问题。
优选的,驱动托盘上设有安装盘,安装盘上设有安装槽,安装槽呈内凹状且用于装
配多轴机器人,安装槽与多轴机器人的安装部配合。
优选的,多轴机器人的安装部处设有锁紧孔,安装盘上设有与锁紧孔对应的螺纹
孔,安装盘的螺纹孔内穿接有与锁紧孔配合的锁紧螺栓。
优选的,控制系统通过电缆与横移驱动电机连接,且电缆沿电缆拖链分布。
优选的,主体框架的设计根据综合各种机器人的载荷数据后经过反复计算确定具
体的结构,根据设计出详细的图纸自行开发模具铸造,铸造框架可以批量生产且结构稳定,
使用过程变量可以控制在±0 .02mm以内,铸铁的机械性能好于焊接结构,整体结构可以承
受15吨正压力,以及宽度方向150KN*m 的弯矩载荷,可以适应与目前所有500kg~1200kg载
荷,满足机器人横移速度2m/s以下。
与现有技术相比,本发明的有益效果是:
本发明的地轨设备可以匹配不同规格、不同品牌的机器人,更可以广泛应用于不
同领域的自动化生产中,在保证机器人运动精度的同时,长度更加灵活多变;而且本发明具
有承载大,柔性高的优点,适用于载荷500kg 以上1200kg以下的所有型号的机器人,适用于
臂展半径2米至4.5米的机器人,填补目前市场上大型机器人第七轴地轨设备的空白。
附图说明
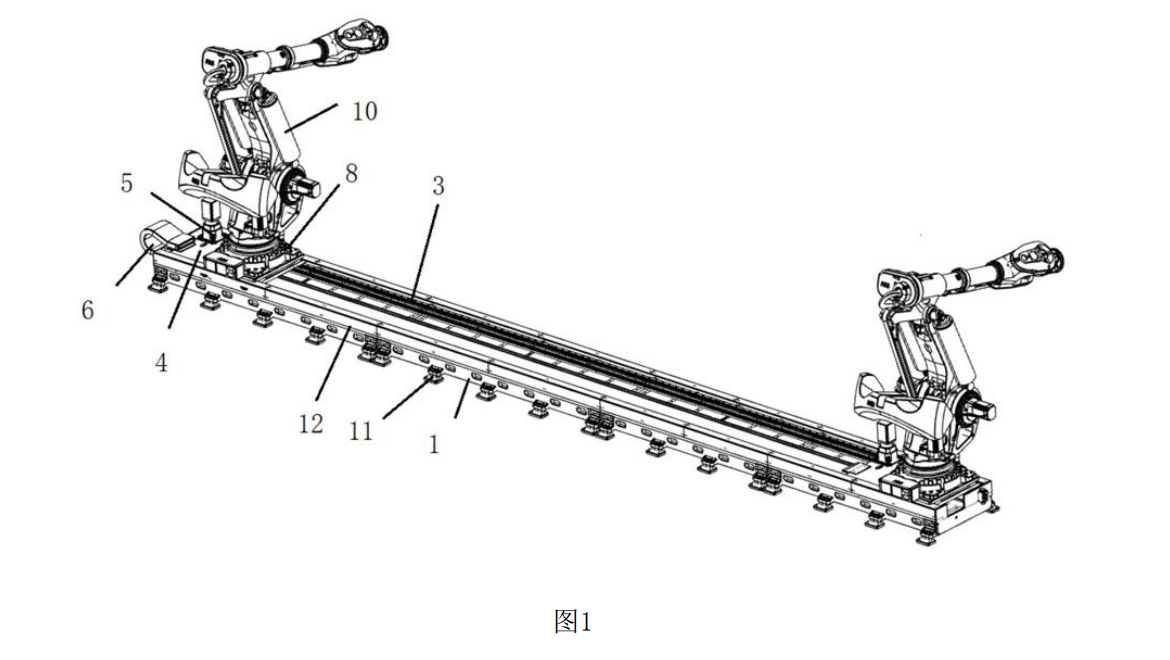
图1为本发明的立体结构示意图;
图2为本发明的局部平面结构示意图;
图3为本发明主体框架的结构示意图;
图4为本发明安装盘的结构示意图;
图5为本发明控制系统的连接模块图。
图中:1、主体框架;11、地轨支撑座;12、支撑型材;121、支撑架板; 122、支撑筋;
123、连接座;2、直线滑轨;3、齿条;4、驱动托盘;5、横移驱动电机;6、电缆拖链;7、温湿度传
感器;8、控制系统;9、安装盘; 91、安装槽;92、螺纹孔;10、多轴机器人。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“竖直”、“上”、“下”、“水平”等指示的方位
或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而
不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此
不能理解为对本发明的限制。
在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、
“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一
体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接
相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理
解上述术语在本发明中的具体含义。
请参阅图1-5,本发明提供一种技术方案:一种大型机器人地轨设备,包括地轨机
构、滑动机构与控制系统8,所述地轨机构置于地面上,地轨机构包括多个主体框架1,多个
主体框架1端部相接串联成地轨机构;所述主体框架 1具有地轨支撑座11与支撑型材12,支
撑型材12包括支撑架板121与支撑筋122,支撑架板121两端部固装连接座123,支撑架板121
内侧固装有支撑筋122,且支撑筋122呈M形状;所述地轨支撑座11沿地面间隔设置,地轨支
撑座11端部通过连接螺栓固接连接座123;所述滑动机构置于地轨机构上部,滑动机构包括
直线导轨2、齿条3、滑块、驱动托盘4与驱动结构,直线导轨2、齿条3互相平行且沿支撑型材
12的长度方向分布,直线导轨2上方间隔设有滑块,且滑块与所述直线滑轨2之间滑动连接。
在本实施例中,支撑架板121侧端部间隔开设有若干加强孔,且加强孔呈椭圆状。
在本实施例中,驱动托盘4置于直线滑轨2上且其端部与滑块连接,驱动托盘4上安
装有驱动机构,驱动机构包括横移驱动电机5与齿轮,横移驱动电机5输出轴端连接齿轮,且
齿轮与齿条啮合,其带动驱动托盘4沿直线滑轨2长度方向移动。
在本实施例中,驱动托盘4上还装设有电缆拖链6,电缆拖链6外设防护套,电缆拖
链6内设间隔分布有温湿度传感器7,且温湿度传感器7通过无线连接控制系统8,温湿度传
感器用于对电缆拖链6内部进行温湿度监测,并传输给控制系统8。
优选的,所述控制系统8包括控制模块、处理模块与报警模块,控制系统8可接收温
湿度监测信息,并进行监控,防止电缆在高温和潮湿状态下造成损害的问题。
在本实施例中,驱动托盘4上设有安装盘9,安装盘9上设有安装槽91,安装槽91呈
内凹状且用于装配多轴机器人10,安装槽91与多轴机器人10的安装部配合。多轴机器人的
具体规格不限定,可为六轴机器人、三轴机器人等。
在本实施例中,多轴机器人10的安装部处设有锁紧孔,安装盘9上设有与锁紧孔对
应的螺纹孔92,安装盘9的螺纹孔92内穿接有与锁紧孔配合的锁紧螺栓。
在本实施例中,控制系统8通过电缆与横移驱动电机5连接,且电缆沿电缆拖链6分布。
在本实施例中,主体框架1的设计根据综合各种机器人的载荷数据后经过反复计
算确定具体的结构,根据设计出详细的图纸自行开发模具铸造,铸造框架可以批量生产且
结构稳定,使用过程变量可以控制在±0 .02mm以内,铸铁的机械性能好于焊接结构,整体结
构可以承受15吨正压力,以及宽度方向150KN*m的弯矩载荷,可以适应与目前所有500kg~
1200kg载荷,满足机器人横移速度2m/s以下。
本发明的地轨设备可以匹配不同规格、不同品牌的机器人,更可以广泛应用于不
同领域的自动化生产中,在保证机器人运动精度的同时,长度更加灵活多变;而且本发明具
有承载大,柔性高的优点,适用于载荷500kg 以上1200kg以下的所有型号的机器人,适用于
臂展半径2米至4.5米的机器人,填补目前市场上大型机器人第七轴地轨设备的空白。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以
理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本发明的范围由所附权利要求及其等同物限定。