


一种关节臂机器人地轨及其制作方法
技术领域:
本发明涉及关节臂机器人领域,具体讲是一种具有减震效果的关节臂机器 人地轨及其制作方法。
背景技术:
现有的关节臂机器人地轨都是由方管焊接,通过热处理方式去应力,再上 CNC加
工中心打孔、铣削等一系列操作加工成型,再配以线轨加齿轮齿条作为传 动机构。
由于现有的地轨都是由方管焊接,在运动过程会产生很大震动,吸震性能 只有整
体矿物铸件地轨的1/20,现有的地轨加工工序多,加工时间长,效率不 高且成本高,现有的
地轨会因机械手臂运行过程中产生的震动导致精度不稳定, 传统齿轮齿条的传动方式移
动速度受限且定位精度不高。
发明内容:
本发明所要解决的技术问题是,提供一种解决现有关节臂机器人地轨震动 大导
致精度不稳定、噪音大等问题以提高吸震性能和刚性的关节臂机器人地轨, 该具有减震效
果的关节臂机器人地轨省去焊接、热处理等工序,大大提高了效 率,节约了成本,并且符合节能环保的需求。
本发明的技术解决方案是,提供一种关节臂机器人地轨,包括大理石地轨, 所述
大理石地轨由高分子矿物材料制作而成。
作为优选的技术方案,所述高分子矿物材料包括填充物和粘接剂,其中, 填充物
由不同尺寸的鹅卵石、玄武石、石英砂组成,粘接剂包括液体环氧树脂 以及固化剂,按质量
百分比计,填充物占比为6685%。
作为优选的技术方案,所述填充剂中,鹅卵石粒径为1020mm ,玄武石粒径 为5
12mm,石英砂粒径为15mm。
作为优选的技术方案,还包括增强材料,增强材料为玻纤短纤,按质量百 分比计,
玻纤短纤占比为110%。
作为优选的技术方案,所述大理石地轨的内部安装有电机预埋螺母,所述 大理石
地轨与所述电机预埋螺母固定连接,所述电机预埋螺母的外侧安装有线 缆预装螺母,所述
大理石地轨与所述线缆预装螺母固定连接,所述电机预埋螺 母的顶部安装有直线电机,所
述直线电机与所述电机预埋螺母固定连接,所述 线缆预装螺母的顶部安装有线缆,所述线
缆预装螺母与所述线缆固定连接,所 述大理石地轨的顶部安装有机器人固定架,所述机器
人固定架滑动连接于所述 大理石地轨的表面,所述机器人固定架的顶部安装有关节臂机
器人本体,所述 机器人固定架与所述关节臂机器人本体固定连接。
作为优选的技术方案,所述大理石地轨与所述线缆预装螺母呈一体式设计, 所述
大理石地轨与所述电机预埋螺母呈一体式设计。
作为优选的技术方案,所述关节臂机器人本体的一侧安装有机器人控制柜, 所述
关节臂机器人本体与所述机器人控制柜固定连接,所述关节臂机器人本体 与所述机器人
控制柜呈一体式设计。
作为优选的技术方案,所述机器人固定架的底部安装有底架,所述底架滑 动连接
于所述大理石地轨的内部,所述底架的内部安装有限制块,所述底架与 所述限制块转动连
接,所述底架的内部对应所述限制块的位置安装有划入槽, 所述划入槽与所述底架呈一体
式设计,所述划入槽的轴截面形状为直角梯形, 所述限制块的轴截面形状为等腰三角形,
所述底架的内部对应所述大理石地轨 的位置安装有限制槽,所述限制槽与所述大理石地
轨呈一体式设计,所述限制 槽的轴截面形状为等腰三角形。
本发明还提供一种关节臂机器人地轨的制作方法,包括以下步骤,
第二步、将模具组装到位,并装好预埋插件;
第三步、倒入混合均匀的高分子矿物材料以及粘接剂;
第四步、通过振动方式将第三步中的混合物的气孔消除;
第五步、固化成型后脱模,并在大理石地轨上装配直线电机。
进一步的,为提高耐磨性和耐腐蚀性,模具组装到位后,模具成型腔内壁 涂抹脱
模剂后再在起表面预涂特氟龙涂层。
采用以上方案后与现有技术相比,本发明具有以下优点:
(1)本发明的关节臂机器人地轨其整体结构刚性大大提高,吸震性是铸铁 的20倍以上;
(2)本发明所采用的关节臂机器人地轨热稳定性好,随着温度变化而产生 形变量是铸铁的1/20。
(3)精度保持性好,震动而导致移位的可能性为零。
(4)耐腐蚀,对油、冷却液、和其他的腐蚀性液体有很好的抗腐蚀性.
(5)节能环保,与铸铁相比,能耗只有铸铁的1%。
本发明的关节臂机器人地轨由尺寸不同的鹅卵石、玄武石、石英砂为填充 物,环
氧树脂、固化剂为粘接剂,将各种组成材料按一定的比例配制,通过搅 拌机搅拌均匀后倒
入模具,再通过振动平台振动将配料中的气孔消除,自然凝 固后可获得致密的高分子矿物
质材料,这种高分子矿物铸件具有良好的粘结性, 极低的变形量,非常高的吸震性能,从而
使关节臂机器人地轨的性能突破原有 材料的约束,同样配置情况下精度等各项性能将远
远超过传统方管焊接地轨, 本发明设计合理,结构巧妙,通过结构之间的相互配合,解决现
有关节臂机器 人地轨震动大导致精度不稳定、噪音大等问题;配以直线电机,解决机械手
移 动速度有限且定位精度不高的问题。
附图说明:
图1为本发明的关节臂机器人地轨的结构示意图;
图2为本发明的关节臂机器人地轨脱模前的示意图;
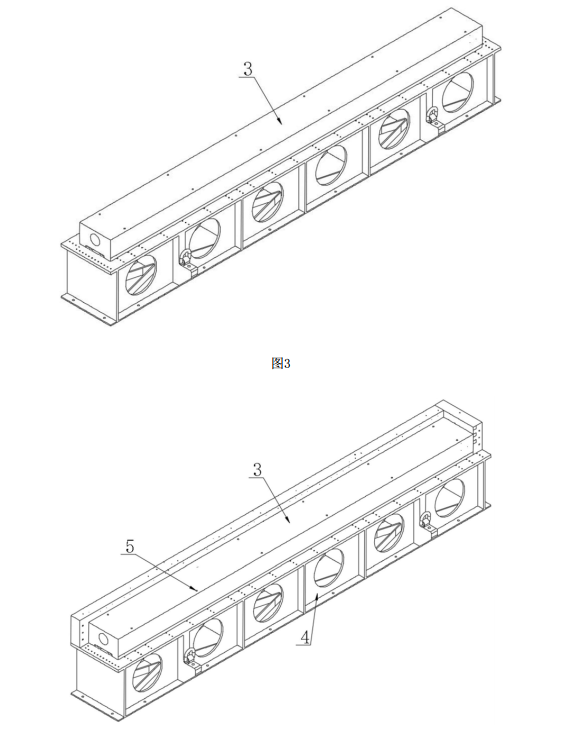
图3为本发明的关节臂机器人地轨拆除模具侧边后示意图;
图4为本发明的关节臂机器人地轨拆除螺栓固定架后示意图;
图5为本发明的关节臂机器人地轨与关节臂机器人本体连接图;
图6为本发明的关节臂机器人地轨剖视图;
图7为本发明的关节臂机器人地轨局部剖视图;
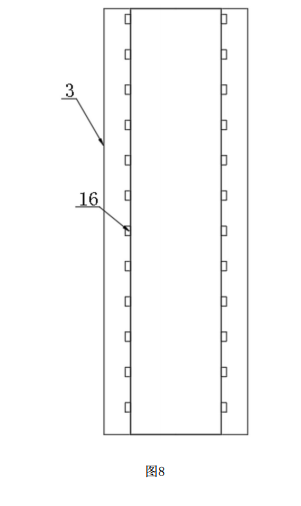
图8为本发明的关节臂机器人地轨局部俯视剖视图。
图中:1、模具侧边;2、螺栓固定架;3、大理石地轨;4、模具底座;5、 地脚螺母;6、直
线电机;7、电机预埋螺母;8、缓冲器安装面;9、线缆预装 螺母;10、油压缓冲器;11、线缆;
12、机器人固定架;13、关节臂机器人本 体;14、机器人控制柜;15、低架;16、限制槽;17、限
制块;18、划入槽; 19、转轴;20、弹簧;21、凸块。
具体实施方式:
下面结合附图就具体实施方式对本发明作进一步说明:
一种关节臂机器人地轨,包括大理石地轨,大理石地轨由高分子矿物材料 制作而
成。具体的,高分子矿物材料包括填充物和粘接剂,其中,填充物由不 同尺寸的鹅卵石、玄
武石、石英砂组成,粘接剂包括液体环氧树脂以及固化剂, 按质量百分比计,填充物占比为6685%。
一般的,所述填充剂中,鹅卵石粒径为1020mm ,玄武石粒径为512mm,石 英砂粒
径为15mm。通过不同粒径的不同材料的组合,实现性能的差异。
并且,为了进一步提高整体强度,还包括增强材料,增强材料为玻纤短纤, 按质量
百分比计,玻纤短纤占比为110%,玻纤短纤的长度为515mm。
将上述物料利用模具成型关节臂机器人地轨。
为进一步描述,本实施例以具体的关节臂机器人地轨做进一步阐述,如图 18,该
关节臂机器人地轨包括由上述物料利用模具成型的大理石地轨3,脱模 前,大理石地轨3的
底部安装有模具底座4,大理石地轨3的外表面安装有模具 侧边1,模具侧边1与大理石地轨
3之间安装有螺栓固定架2,螺栓固定架2的 轴截面形状为Z字形,并且,大理石地轨3中预埋
有线缆预装螺母9和电机预 埋螺母7,大理石地轨3成型后与线缆预装螺母9呈一体式设计,
同样的,大理 石地轨3与电机预埋螺母7呈一体式设计,使固定更加牢固。
大理石地轨3的内部对应螺栓固定架2的位置还安装有地脚螺母5,大理石 地轨3
与地脚螺母5呈一体式设计,地脚螺母5与螺栓固定架2相匹配,大理 石地轨3的一端安装有
缓冲器安装面8,大理石地轨3与缓冲器安装面8呈一体 式设计,电机预埋螺母7的外侧安装
有线缆预装螺母9,大理石地轨3与线缆预 装螺母9固定连接,电机预埋螺母7的顶部用于安
装直线电机6,直线电机6与 电机预埋螺母7之间通过螺栓固定,直线电机6滑动连接于大理
石地轨3的内 部,缓冲器安装面8与线缆11之间通过螺栓固定,增加移动的稳定性,使移动更加稳固。
直线电机6与电机预埋螺母7固定连接,线缆预装螺母9的顶部安装有线 缆11,线
缆预装螺母9与线缆11固定连接,大理石地轨3的顶部还安装有机器 人固定架12,机器人固
定架12与关节臂机器人本体13之间通过焊机焊接或常 规紧固连接件进行固定连接,机器
人固定架12的底部安装有底架15,底架15 滑动连接于大理石地轨3的内部,增加装置的稳定性,使装置更加稳固。
底架15的内部安装有限制块17,底架15与限制块17转动连接,底架15 的内部对于
限制块17的位置安装有划入槽18,划入槽18与底架15呈一体式设 计,划入槽18的轴截面形
状为直角梯形,限制块17的轴截面形状为等腰三角 形,底架15的内部对于大理石地轨3的
位置安装有限制槽16,限制槽16与大 理石地轨3呈一体式设计,限制槽16的轴截面形状为
等腰三角形,使移动更加 稳定,且有效的防止脱轨。
限制块17的内部安装有凸块21,限制块17与凸块21呈一体式设计,限制 块17与低
架15之间安装有转轴19,低架15与限制块17通过转轴19转动连接, 转轴19的内部对应凸块
21的位置安装有弹簧20,凸块21与凸块21焊接,凸 块21滑动连接于转轴19的内部,使固定更加方便,且移动更加稳固。
机器人固定架12滑动连接于大理石地轨3的表面,机器人固定架12的顶 部安装有
关节臂机器人本体13,机器人固定架12与关节臂机器人本体13固定 连接,关节臂机器人本
体的一侧安装有机器人控制柜14,关节臂机器人本体13 与机器人控制柜14呈一体式设计,
缓冲器安装面8的位置还可以安装有油压缓 冲器10,缓冲器安装面8与油压缓冲器10通过螺栓固定。
鉴于本发明的关节臂机器人地轨的**性,其制作方法也不同于传统制作, 具体的,关节臂机器人地轨的制作方法,包括以下步骤,
***步、根据地轨结构,设计制作出一逆向的导轨安装面及直线电机安装 面的拼装模具,从而满足精度要求;
第二步、将模具组装到位,并装好预埋插件;
第三步、通过搅拌机将各物料搅拌均匀后,在模具中倒入混合均匀的高分 子矿物材料以及粘接剂;
第四步、通过振动平台的振动将第三步中的混合物的气孔消除;
第五步、自然固化成型后脱模,然后在大理石地轨上装配直线电机。
为了对不同材料组合的性状做直观了解,下面分别以实施例1、实施例2, 实施例3以及对比例进行对比,其中,
实施例1中,按质量百分比计,大理石地轨由16mm鹅卵石15% ,8mm玄武石 粒28%,
3mm石英砂40%,液体环氧树脂16%,固化剂1%自然固化而成。
实施例2中,按质量百分比计,大理石地轨由16mm鹅卵石25% ,8mm玄武石 粒20%,
3mm石英砂35%,液体环氧树脂19%,固化剂1%自然固化而成。
实施例3中,按质量百分比计,大理石地轨由16mm鹅卵石15% ,8mm玄武石 粒28%,
3mm石英砂35%,液体环氧树脂16%,固化剂1%以及6%的长度为8mm的 玻纤短纤自然固化而成。
对比例为背景技术中提及的现有焊接工艺而成的方管式地轨。
测量各实施例和对比例的弹性模量、抗拉强度、抗压强度、导热系数和震 动系数,
结果如表1所示:
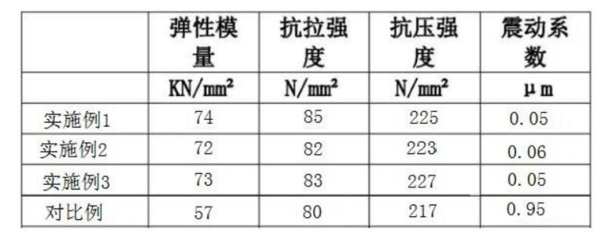

并且,在对上述实施例和对比例进行耐磨性测试,在地轨表面用5kg砝码 置于顶
针,实施例1、实施例2、实施例3和对比例耐刮性分别为5732转、5755 转、6543转和4756转。
本发明具有以下优点:由尺寸不同的鹅卵石、玄武石、石英砂为填充物, 环氧树
脂、固化剂为粘接剂,将各种组成材料按一定的比例配制,通过搅拌机 搅拌均匀后倒入模
具,再通过振动平台振动将配料中的气孔消除,自然凝固后 可获得致密的高分子矿物质材
料,这种高分子矿物铸件具有良好的粘结性,极 低的变形量,非常高的吸震性能,从而使关
节臂机器人地轨的性能突破原有材 料的约束,同样配置情况下精度等各项性能将远远超
过传统方管焊接地轨,本 发明设计合理,结构巧妙,通过结构之间的相互配合,解决现有关
节臂机器人 地轨震动大导致精度不稳定、噪音大等问题;配以直线电机,解决机械手移动
速度有限且定位精度不高的问题。
以上仅就本发明较佳的实施例作了说明,但不能理解为是对权利要求的限 制。凡
是利用本发明说明书所做的等效结构或等效流程变换,均包括在本发明 的***保护范围之内。



来源:百度文库





来源:百度文库
