
 在线客服
在线客服 企业微信
企业微信







 [VIP第1年] 指数:5
[VIP第1年] 指数:5 通过认证
通过认证



免示教焊接机器人包角焊与连续焊
 寻位过程,测量拐角位置
寻位过程,测量拐角位置免示教焊接机器人腰圆连续焊接

免示教焊接机器人小摆幅电弧跟踪

小摆幅电弧跟踪
1. 焊机电流信号直接采集处理:1mm小摆幅电弧跟踪
2.焊点位置信号过滤:
a. 采集基准信号时如果经过焊点会导致偏差;
b. 通过采集信号比对,排除焊点位置,保持电弧跟踪稳定
免示教焊接机器人箱型柱坡口自适应
免示教焊接机器人箱型柱坡口自适应

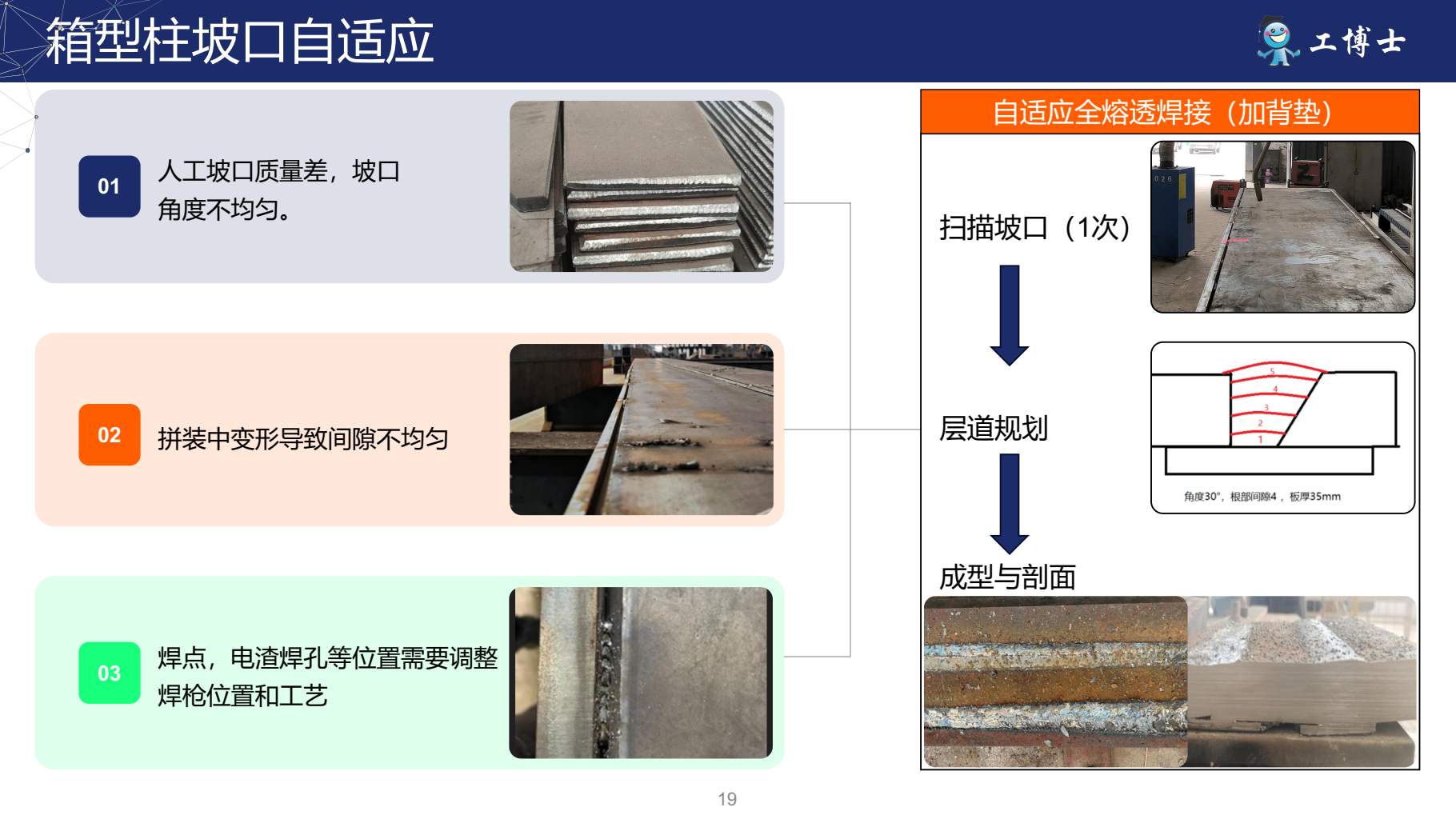
箱型柱坡口自适应:
原本:
原本:
1. 人工坡口质量差,坡口角度不均匀
2. 拼装中变形导致间隙不均匀
3. 焊点,电渣焊孔等位置需要调整焊枪位置和工艺
免示教版本:自适应全熔透焊接(加背垫)
扫描坡口(1次)
层道规划
成型剖面









