在线客服
在线客服 企业微信
企业微信







 [VIP第6年] 指数:4
[VIP第6年] 指数:4 通过认证
通过认证



1 运动板额定负载 1200kg
2 机器人臂展 2600mm 以内
3 机器人抓取 10-50kg
4 减速比 1:10
5 运行速度 1250mm/S 可调速
6 加速度 1000mm/m?
7 加、减速时间 0.75/S 各给时间
8 有效行程 按要求
9 外形尺寸(长×宽×高) W=500mm,H=300mm,L=有效行程加 1000mm
10 重复定位精度 ±0.1mm
11 安装方式 水平
12 供电条件 三相 380V±10% 50HZ
13 设备净重 每米约 200kg
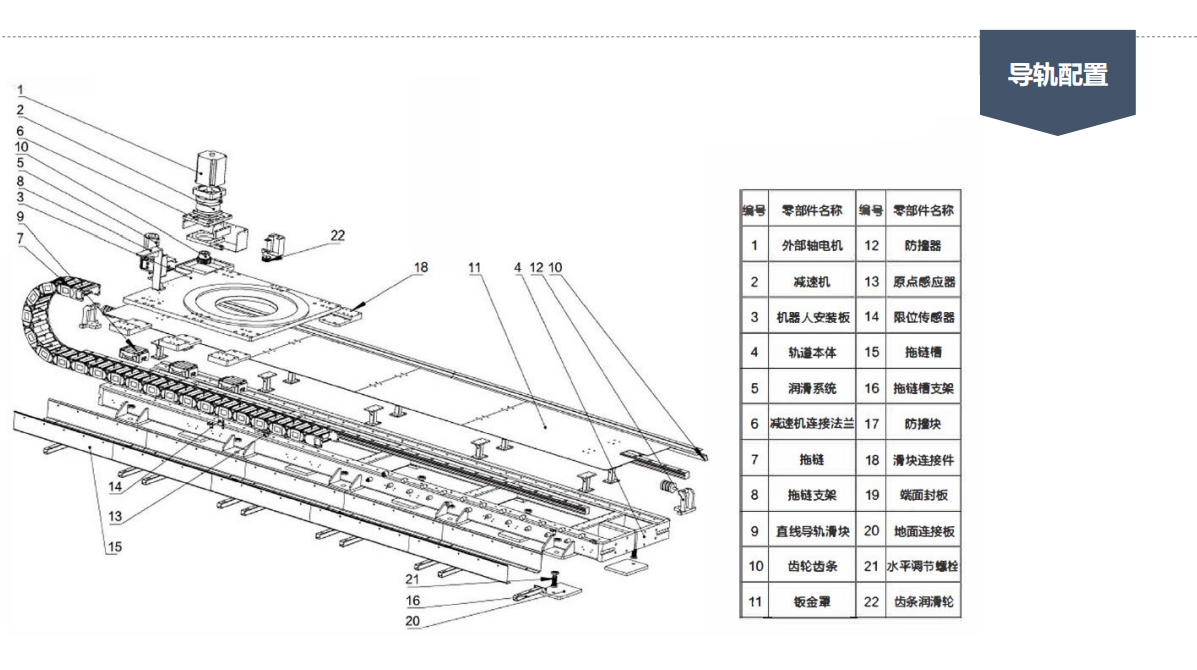
二、行走轨道概述
1:轨道本体材质为焊接件,标准长度拼接件,长度分为 6 米、5 米、4 米、3 米、2 米、1.5 米五种规可拼接
2:拼接长度超过 15 米由第三方激光水平仪检测,出精度数据
3: 轨道本体为钢件 铸造后退火去应力后抛丸处理表面再进行机械加工直线导轨、齿条和拼接安装面。
4: 轨道与地面连接板连接可水平调节,地面连接板由 M16 化学螺栓固定。
5: 机器人安装板材质为 45#钢,螺栓连接位置加厚钢板保证螺纹紧固连接。
6: 拖链安装在轨道的外侧或内测,由拖链槽加支架固定,弯曲半径 R250 减少线缆的易损度,如长度 8 米以上需要增加滚轮支架。
7: 硬限位安装在轨道的两端,材质为 Q235 钢件加弹性缓冲器。
8: 限位开关安装在机器人运动板上,限位方式为接触式工博士科技股份有限公司
9: 该设备表面处理为喷漆,颜色为 RAL 7036 深灰色
10. 钣金式防尘罩(半封闭式)3mm 花纹板折弯 螺丝连接风琴式全封闭防尘罩
11:润滑系统 进口润滑泵分流器润滑滑块,齿条润滑配有毛毡轮
12:原点标识安装在机器人运动板上,刻度安装在轨道两侧。
13:直线导轨水平安装,滑块为 4 个 由润滑系统集中供油
14:齿轮齿条为斜齿 四面研磨级
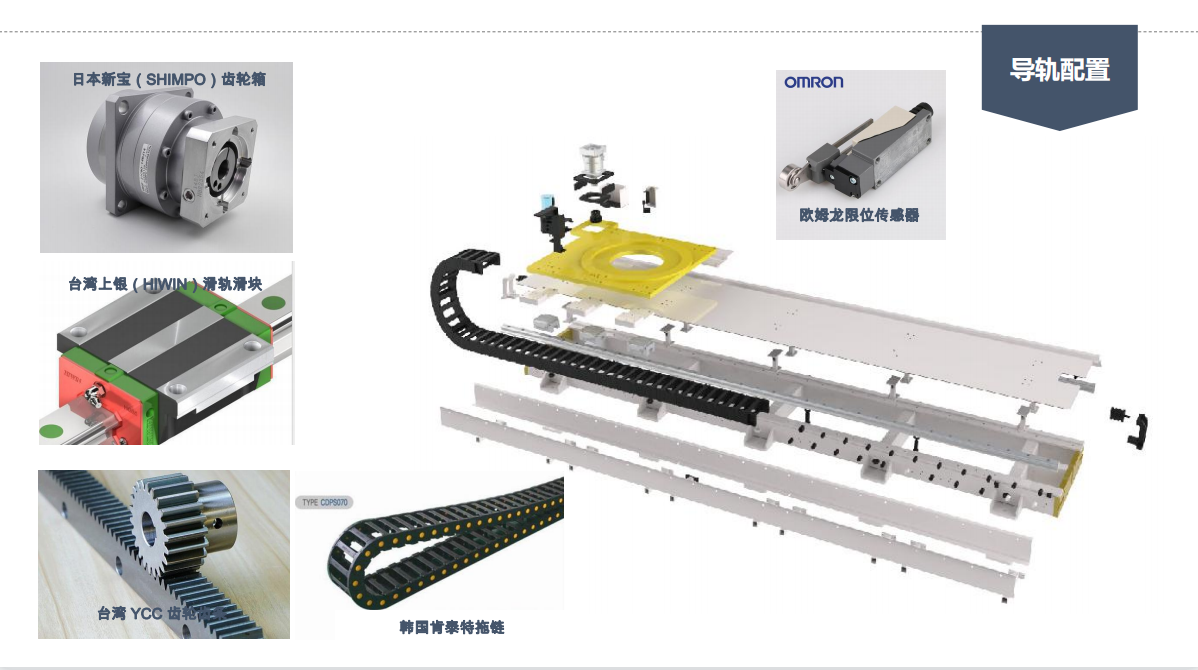
三、详细配置
1 轨道本体 工博士 乙方提供
2 行星减速机 日本新宝(SHIMPO) 乙方提供
3 直线导轨 台湾上银 HGW35 乙方提供
4 滑块 台湾上银 HGW35CC 乙方提供
5 齿轮齿条 台湾 YYC/模数 3 斜齿 齿轮 25 齿 乙方提供
6 润滑系统 工博士 乙方提供
7 防尘罩 工博士/半封闭钣金式/风琴式 乙方提供
8 硬限位弹性缓冲器 工博士 乙方提供
9 机器人安装板 工博士/680*600*25mm 乙方提供
10 地面连接板 工博士 乙方提供
11 拖链 德国 IGUS,W=40mm,H=150mm,R250mm,乙方提供
12 减速机连接法兰 工博士 乙方提供
13 伺服电机 ①联动外部轴 2-2.5KW②不联动电机
14 限位传感器 日本欧姆龙 乙方提供
15 调节螺栓 工博士 M36 螺纹 乙方
四、颜色
1 轨道本体 浅蓝色 RAL9016 平光
2 机器人运动板 中黄 RAL1021 橘纹
3 连接件 镀锌 蓝白锌
4 防尘罩 花纹铝板 光亮