
 在线客服
在线客服 企业微信
企业微信








 [VIP第2年] 指数:1
[VIP第2年] 指数:1 通过认证
通过认证
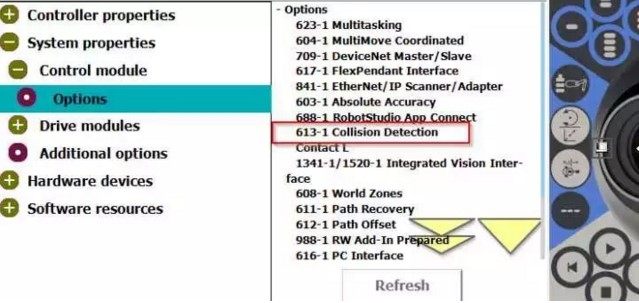
主要功能
Collision Detection 碰撞检测的主要作用是减少碰撞力对机器人本体的影响,避免机器人本体或者外围设损坏。它比一般地运动侦测功能更为灵敏,当碰撞发生时,机器人会立即停止,并沿之前的行走路径往反方向移动一小段距离以释放残余应力。当碰撞报警被确认之后,不需要重新上电,机器人就可以继续沿着之前的路径继续工作。
选项所包含的内容:
00001.用来定义开关功能及调整敏感度的系统参数(全局)
00002.可在线调整敏感度的指令:MotionSup (局部)
敏感度(Motion Supervision Level)默认值100%,*大值300%。数值越大敏感度越低。
Collision Detection 功能可调可开可关,取决于客户实际需要。
关于碰撞
安装Collision Detection后, 碰撞时会发生什么?
当碰撞发生时,机器人会立即停止,并沿之前的行走路径往反方向移动一小段距离以释放残余应力。程序停止运行并显示错误报警。机器人依然保持上电,从而使机器人在确认报错信息后可以继续工作。
碰撞示意图









