
 在线客服
在线客服 企业微信
企业微信








 [VIP第4年] 指数:1
[VIP第4年] 指数:1
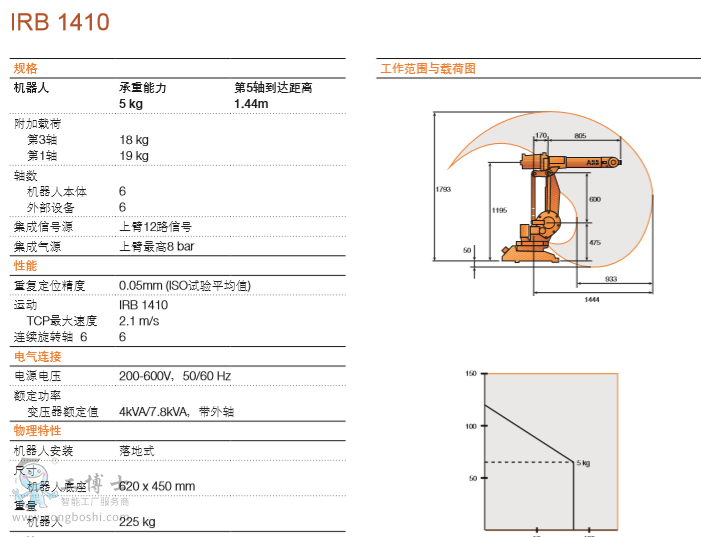
ABB IRB 1410-5/1.45
IRB 1410采用优化设计,设送丝机走线安装孔,为机械 臂搭载工艺设备提供便利。标准IRC5机器人控制器内置 各项人性化弧焊功能,可通过**的编程操作手持终端 FlexPendant(示教器)进行操控。
一、
ABB机器人简介:操控与途径精密度更上一层楼
IRB 1410采用优化设计,设送丝机走线安装孔,为机械 臂搭载工艺设备提供便利。标准IRC5机器人控制器内置 各项人性化弧焊功能,可通过**的编程操作手持终端 FlexPendant(示教器)进行操控。
1.IRB1410在弧焊、物料搬运和操作过程应用场景经过磨练,自1992年至今的全球安装数量已超出14000台。IRB1410产生功能包IRB1410弧焊.
2.负载:5kg 空间范围:1.45m
3.主要用途:弧焊,上下料,物料搬运等领域
二、产品特性:
2.负载:5kg 空间范围:1.45m
3.主要用途:弧焊,上下料,物料搬运等领域
二、产品特性:
1.可靠性--稳固且经久耐用:IRB1410以其稳固稳定的构造而闻名,而就此产生的其余优越性是躁音程度低、常规维护间隔时间长、使用寿命长。
2.准确性--稳定稳定:非凡的操控程度和循径精密度(+0.05mm)保障了出众的工作质量。
3.稳固--及时运用:该机器人运行范围大、到达距离长(***长1.44m)。承重能力为5kg,上臂可承受18kg的附加载荷。这在类似机器人中无可比拟。
4高速--较短的运行周期:机器人本体稳固,标准配置快速精密的IRC5控制器,可合理有效减短运行周期,提升 生产率。
5.弧焊--集成:在机器人手臂上的送丝机构,搭配IRC5运用的弧焊功能还有***的单点编程示教器,适合弧焊的运用。
三、技术参数如下图:
三、技术参数如下图:

更多机器人请咨询:
ABB机器人









