
 į┌Ž▀┐═Ę■
į┌Ž▀┐═Ę■
 Ų¾ęĄ╬óą┼
Ų¾ęĄ╬óą┼








 [VIPĄ┌5─Ļ] ųĖ╩²:1
[VIPĄ┌5─Ļ] ųĖ╩²:1
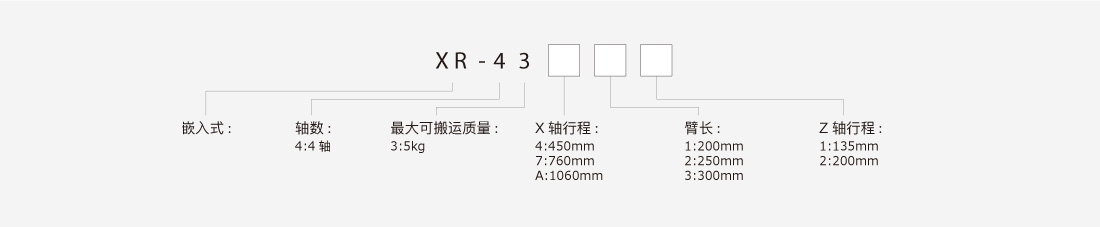
Ąńū░╗·Ų„╚╦XRŽĄ┴ą
ų▒Č»ųß║═ą²ū¬ųß▓╔ė├Ą§ū░Įß╣╣Ż¼╗·ąĄ╩ųį┌š²Ž┬ĘĮį╦ąąŻ¼┐╔ŪČ╚ļąĪą═╔Ķ▒ĖĪŻĪĪXųßąą│╠Ż³4507601060mm
Zųßąą│╠Ż³135200mm
*┤¾┐╔░ßį╦ų╩┴┐Ż³5kg
▒Ļū╝čŁ╗Ę╩▒╝õŻ³0.56├ļ
Ž╦ŽĖĄ─Įß╣╣Ż¼┐╔╩╣╔Ķ▒ĖĄ─┐ĒČ╚║═Ė▀Č╚Š∙ėą╦∙╝§╔┘ĪŻ
▓╔ė├Ą§ū░╩ĮĮß╣╣Ż¼ęį╩ĄŽųŲõ╣żū„ĘČ╬¦Ą─*┤¾╗»ĪŻ
į╦ąą╦┘Č╚┐ņŻ¼┐╔╩╣╔Ķ▒ĖĄ─╔·▓·ą¦┬╩╠ßĖ▀
▓╔ė├ų▒Č»ųß║═ą²ū¬ųߥ─┴¬║Žį╦ąąĘĮ╩ĮŻ¼ėļ▒Š╣½╦ŠĄ─ų▒ĮŪū°▒Ļ╩Į╗·ąĄ╩ųŽÓ▒╚Ż¼╔·▓·ą¦┬╩╠ßĖ▀17%Ż©P-Pį╦ąąŻ®
▒Ļū╝┼õų├╣żŠ▀ė├┐šŲ°┼õ╣▄Ż©1╠§Ąń┬ĘŻ®Īó┼õŽ▀Ż©10Ė∙Ż®ĪŻ
Ąń┤┼ʦ╬¬čĪ┼õ╝■Ż©4Ė÷Ż®
ą═║┼ŽĻĮŌ
| ŽŅ─┐ | Ąź╬╗ | ╣µĖ± | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| ų„╠Õą═║┼(*1) | - | XR-4341* | XR-4371* | XR-4372* | XR-4373* | XR-43A1* | XR-43A2* | XR-43A3* | |||
| ųß╩² | - | 4 | |||||||||
| ╬╗ų├╝ņ▓ŌĘĮ╩Į | - | **▒Ó┬ļŲ„ | |||||||||
| Ū²Č»Ąń╗·ĪóųŲČ»Ų„ | - | ┤°╚½ųßAC╦┼Ę■Ąń╗·/Z▌SĪĪ┤°ųŲČ»Ų„ | |||||||||
| ╗·ąĄ▒█╚½│ż(Ą┌1▒█ + Ą┌2▒█) | mm | 200 | 250 | 300 | 200 | 250 | 300 | ||||
| Č»ū„ĮŪČ╚ ╝░ ąą│╠ | XŻ©Ą┌1ų߯® | mm | 450 | 760 | 1,060 | ||||||
| RŻ©Ą┌2ų߯® | ° | ±168 | |||||||||
| ZŻ©Ą┌3ų߯® | mm | *=1Ż║135Īó*=2Ż║200 | |||||||||
| TŻ©Ą┌4ų߯® | ° | ±360 | |||||||||
| *┤¾┐╔░ßį╦ų╩┴┐ | kg | 5 | |||||||||
| ║Ž│╔*┤¾╦┘Č╚ (╣żŠ▀░▓ū░├µųąą─) |
╗·ąĄ▒█Ū░Č╦ | mm/sec | 3,650 | 3,600 | 3,240 | ||||||
| Z | 1,500 | ||||||||||
| T | °/sec | 720 | |||||||||
| ųžĖ┤Č©╬╗Š½Č╚(╣żŠ▀░▓ū░├µųąą─)(*2) | X+R | mm | ±0.015 | ||||||||
| Z | ±0.01 | ||||||||||
| T | ° | ±0.005 | |||||||||
| *┤¾╚▌ąĒ╣▀ąį┴”Šž Ż©╣▀ąįŻ® |
kgm2 | 0.05 | |||||||||
| ė├╗¦ė├Ų°Č»┼õ╣▄ | - | ┐šŲ°╣®Ė°▓┐ĪĪφ8X1Ż©čĪ╝■╩▒ ┼õ▒ĖŲń╣▄ʦĪĪ4ŽĄ═│(φ4Żž8)Ż® | |||||||||
| ė├╗¦ė├ą┼║┼Ž▀ | - | 10ąŠŻ©Į³Įė┤½ĖąŲ„Ą╚Ą─ą┼║┼Ž▀Ż® | |||||||||
| ┐šŲ°į┤ | │Żė├č╣┴” | Mpa | 0.05Ī½0.35 | ||||||||
| *┤¾╚▌ąĒč╣┴” | 0.59 | ||||||||||
| ų╩┴┐(*3) | kg | į╝33 | į╝45 | į╝46 | į╝47 | į╝51 | į╝52 | į╝53 | |||
- *1.ą═╩ĮųąĄ─“*”▒Ē╩ŠZųßąą│╠ĪŻ
- *2.ųžĖ┤Č©╬╗Š½Č╚╬¬╗ĘŠ│╬┬Č╚║ŃČ©╩▒Ą─Š½Č╚ĪŻ
- *3.╝ŪįžČÓųų└Óą═ų╩┴┐(Z=200mm)ĪŻ
Ė³ČÓ▓·ŲĘŪļū╔č»:Ąńū░╗·Ų„╚╦










