
 在线客服
在线客服 企业微信
企业微信







 [VIP第5年] 指数:1
[VIP第5年] 指数:1
电装机器人LPH-040/060/070A1
小型,轻量,紧凑的设备 一定能满足您的需求。
*大工作范围|400mm/600mm700mm
*大可搬运质量|3kg/6kg
重复定位精度|±0.02mm
三种产品机型
丰富的产品机型,可以广泛使用在3C汽车EMS等行业中。

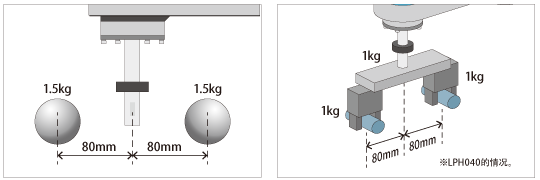
高惯性力矩 (0.075kg^2)
通过大惯性力矩支持,实现高自由度手部设计。可对应双手部设计。
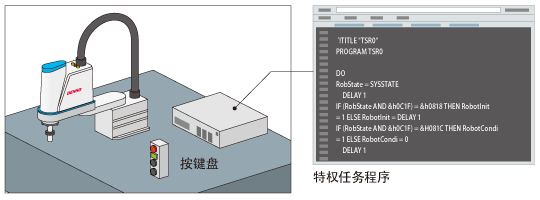
通过特权任务功能 实现免PLC化
标准搭载的特权任务功能与按键盘相结合,实现免PLC设计。设备成本可进一本降低。
| 项目 | 规格 | ||||
|---|---|---|---|---|---|
| 机器人(*1) | LPH-040A1 | LPH-060A1 | LPH-070A1 | ||
| 臂全长(第1臂+第2臂) | 200+200=400mm | 300+300=600mm | 400+300=700mm | ||
| 运行角度、行程及电机容量 | J1(第1轴) | ±130° | ±133° | ||
| J2(第2轴) | ±146.6° | ±153° | |||
| Z(第3轴) | 150mm | 200mm | |||
| T(第4轴) | ±360° | ||||
| 轴组合 | J1(第1轴)+J2(第2轴)+Z(第3轴)+T(第4轴) | ||||
| *大可搬运质量 | 3kg | 6kg | |||
| 标准循环时间(负载1kg/负载2kg)(*2) | 0.45sec | 0.39 / 0.42sec | 0.40 / 0.43sec | ||
| *大合成速度 | 臂前端 | 4,710mm/sec | 5,073mm/sec | 5,592mm/sec | |
| Z |
1,250mm/sec
|
1,111mm/sec
|
|||
| T |
1,875deg/sec
|
2,000deg/sec
|
|||
| 重复定位精度 (工具安装面中心)(*3) |
J1+J2 | ±0.02mm | |||
| Z | 0.02mm | ||||
| T | ±0.01° | ||||
| *大输入压力(向下,1秒以下) | 90N(1秒以内) |
350N(1秒以内) | |||
| *大容许惯性力矩(惯性) | 0.075kgm2 |
0.023kgm2 |
|||
| 位置检测方式 | **编码器 | ||||
| 驱动电机/制动器 |
全轴AC伺服电机 / Z轴带制动器
|
||||
| 用户空气配管 | 3系统(φ4×2、φ6×1) | 3系统(φ4×1、φ6×2) | |||
| 用户信号线 | 15芯(近接传感器等的信号线) | ||||
| 空气源 | 常用压力 | 0.05~0.35MPa | |||
| *大容许压力 | 0.6MPa | ||||
| 质 量 | 约16 kg | 约20 kg | |||
(*2)负载1kg/2kg时,用机器人将物体举起至25mm的高处,在相距300mm的两点间往返所需的时间。
(*3)重复定位精度是周围环境温度恒定时的精度。
更多产品请咨询:电装机器人









