
 在线客服
在线客服 企业微信
企业微信







 [VIP第5年] 指数:1
[VIP第5年] 指数:1
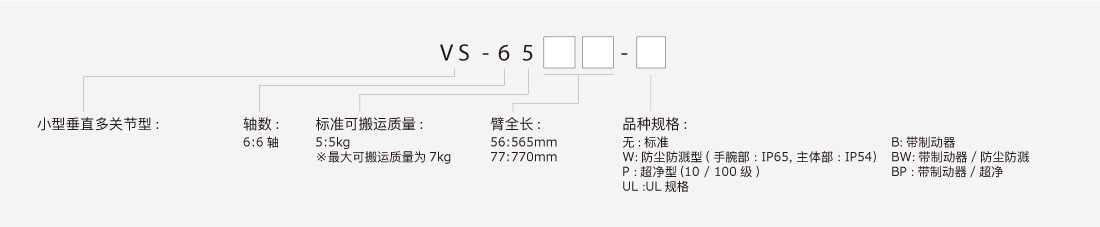
电装机器人VS-6556/6577
外形紧凑、小巧,高速与高搬运性能兼备。
*大动作领域|653854mm
*大可搬运质量|7kg
标准循环时间|0.490.59秒
标准
| 项目 | 标准 | 标准、带制动器 | |||
|---|---|---|---|---|---|
| 本体型式 | VS-6556 | VS-6577 | VS-6556-B | VS-6577-B | |
| 轴数 | 6 | ||||
| 机械臂全长 | 270(第1臂)+ 295(第2臂)=565mm |
365(第1臂)+ 405(第2臂)=770mm |
270(第1臂)+ 295(第2臂)=565mm |
365(第1臂)+ 405(第2臂)=770mm |
|
| 机械臂偏移 | J1(旋转):75mm J3(前腕):90mm | ||||
| *大动作领域 | R=733mm(工具安装面) R=653mm (P点:J4、J5、J6中心) |
R=934mm(工具安装面) R=854mm (P点:J4、J5、J6中心) |
R=733mm(工具安装面) R=653mm (P点:J4、J5、J6中心) |
R=934mm(工具安装面) R=854mm (P点:J4、J5、J6中心) |
|
| 动作角度 | J1:±170°、 J2:+135°,-100°、 J3:+166°,-119°、 J4:±190°、 J5:±120°、 J6:±360° |
J1:±170°、 J2:+135°,-100°、 J3:+169°,-119°、 J4:±190°、 J5:±120°、 J6:±360° |
J1:±170°、 J2:+135°,-100°、 J3:+166°,-119°、 J4:±190°、 J5:±120°、 J6:±360° |
J1:±170°、 J2:+135°,-100°、 J3:+169°,-119°、 J4:±190°、 J5:±120°、 J6:±360° |
|
| *大可搬运质量 | 7kg(手腕部向下±45°以内)(※4) | ||||
| 合成*大速度 | 8200mm/s (工具安装面中心) |
7600mm/s (工具安装面中心) |
8200mm/s (工具安装面中心) |
7600mm/s (工具安装面中心) |
|
| 标准循环时间(※1) | 约0.4台(sec) | 约0.5台(sec) | 约0.4台(sec) | 约0.5台(sec) | |
| 重复定位精度(※2) | X,Y,Z各方向:±0.02mm (工具安装面中心) |
X,Y,Z各方向:±0.03mm (工具安装面中心) |
X,Y,Z各方向:±0.02mm (工具安装面中心) |
X,Y,Z各方向:±0.03mm (工具安装面中心) |
|
| *大容许惯性力矩 | J4、J5周围:0.41kgm2 J6周围:0.063kgm2 (负荷设定7kg时) | ||||
| 位置检测方式 | **编码器 | ||||
| 驱动电机、制动器 | 带全轴AC伺服电机、J2~J4带制动器 | 带全轴AC伺服电机、J2~J6带制动器 | |||
| 制动器解除操作 | 通过TP、MP操作解除制动器 | ||||
| 用户用气动配管(※3) | 7系統(φ4x6、φ6x1) 电磁阀(2位置、双电磁阀)内置3个 |
||||
| 用户用信号线 | 10芯(近接传感器等的信号线) | ||||
| 空气源 | 常用压力 | 1.0×105Pa~3.9×105Pa | |||
| *大容许压力 | 4.9×105Pa | ||||
| 保护等级 | IP40 | ||||
| 空气传播噪音 | 80dB以下(A加权等效连续声压级) | ||||
| 质量 | 约35kg (77lb) | 约36kg (80lb) | 约35kg (77lb) | 约36kg (80lb) | |
- 1.负荷1kg时,用机器人将物体举起至25mm的高处,在相距300mm的两点间往返所需的时间。
- 2.重复定位精度是周围环境温度恒定时的精度。
- 3.只有φ4×6可用内置电磁阀控制。
- 4.手腕部向下超过±45°时,*大可搬运质量为6kg。
防尘防溅
| 项目 | 防尘防溅 | 防尘防溅、带制动器 | |||
|---|---|---|---|---|---|
| 本体型式 | VS-6556-W | VS-6577-W | VS-6556-BW | VS-6577-BW | |
| 轴数 | 6 | ||||
| 机械臂全长 | 270(第1臂)+ 295(第2臂)=565mm |
365(第1臂)+ 405(第2臂)=770mm |
270(第1臂)+ 295(第2臂)=565mm |
365(第1臂)+ 405(第2臂)=770mm |
|
| 机械臂偏移 | J1(旋转):75mm J3(前腕):90mm | ||||
| *大动作领域 | R=733mm(工具安装面) R=653mm (P点:J4、J5、J6中心) |
R=934mm(工具安装面) R=854mm (P点:J4、J5、J6中心) |
R=733mm(工具安装面) R=653mm (P点:J4、J5、J6中心) |
R=934mm(工具安装面) R=854mm (P点:J4、J5、J6中心) |
|
| 动作角度 | J1:±170°、 J2:+135°,-100°、 J3:+166°,-119°、 J4:±190°、 J5:±120°、 J6:±360° |
J1:±170°、 J2:+135°,-100°、 J3:+169°,-119°、 J4:±190°、 J5:±120°、 J6:±360° |
J1:±170°、 J2:+135°,-100°、 J3:+166°,-119°、 J4:±190°、 J5:±120°、 J6:±360° |
J1:±170°、 J2:+135°,-100°、 J3:+169°,-119°、 J4:±190°、 J5:±120°、 J6:±360° |
|
| *大可搬运质量 | 7kg(手腕部向下±45°以内)(※4) | ||||
| 合成*大速度 | 8200mm/s (工具安装面中心) |
7600mm/s (工具安装面中心) |
8200mm/s (工具安装面中心) |
7600mm/s (工具安装面中心) |
|
| 标准循环时间(※1) | 约0.4台(sec) | 约0.5台(sec) | 约0.4台(sec) | 约0.5台(sec) | |
| 重复定位精度(※2) | X,Y,Z各方向:±0.02mm (工具安装面中心) |
X,Y,Z各方向:±0.03mm (工具安装面中心) |
X,Y,Z各方向:±0.02mm (工具安装面中心) |
X,Y,Z各方向:±0.03mm (工具安装面中心) |
|
| *大容许惯性力矩 | J4、J5周围:0.413kgm2 J6周围:0.063kgm2 (负荷设定7kg时) | ||||
| 位置检测方式 | **编码器 | ||||
| 驱动电机、制动器 | 带全轴AC伺服电机、J2~J4带制动器 | 带全轴AC伺服电机、J2~J6带制动器 | |||
| 制动器解除操作 | 通过TP、MP操作解除制动器 | ||||
| 用户用气动配管(※3) | 7系统(φ4x6、φ6x1)电磁阀(2位置、双电磁阀)×3 | ||||
| 用户用信号线 | 10芯(近接传感器等的信号线) | ||||
| 空气源 | 常用压力 | 1.0×105Pa~3.9×105Pa | |||
| *大容许压力 | 4.9×105Pa | ||||
| 保护等级 | IP54(手腕部IP65) | ||||
| 空气传播噪音 | 80dB以下(A加权等效连续声压级) | ||||
| 质量 | 约35kg(约77lb) | 约36kg(约80lb) | 约35kg(约77lb) | 约36kg(约80lb) | |
- 1.负荷1kg时,用机器人将物体举起至25mm的高处,在相距300mm的两点间往返所需的时间。
- 2.重复定位精度是周围环境温度恒定时的精度。
- 3.只有φ4×6可用内置电磁阀控制。
- 4.手腕部向下超过±45°时,*大可搬运质量为6kg。
净化室
| 项目 | 净化室 | 净化室、带制动器 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 本体型式 | VS-6556 -P10 |
VS-6556 -P100 |
VS-6577 -P10 |
VS-6577 -P100 |
VS-6556 -BP10 |
VS-6556 -BP100 |
VS-6577 -BP10 |
VS-6577 -BP100 |
|
| 轴数 | 6 | ||||||||
| 机械臂全长 | 270(第1臂) +295(第2臂)=565mm |
365(第1臂) +405(第2臂)=770mm |
270(第1臂) +295(第2臂)=565mm |
365(第1臂) +405(第2臂)=770mm |
|||||
| 机械臂偏移 | J1(旋转):75mm J3(前腕):90mm | ||||||||
| *大动作领域 | R=733mm(工具安装面) R=653mm (P点:J4、J5、J6中心) |
R=934mm(工具安装面) R=854mm (P点:J4、J5、J6中心) |
R=733mm(工具安装面) R=653mm (P点:J4、J5、J6中心) |
R=934mm(工具安装面) R=854mm (P点:J4、J5、J6中心) |
|||||
| 动作角度 | J1:±170°、 J2:+135°,-100°、 J3:+166°,-119°、 J4:±190°、 J5:±120°、 J6:±360° |
J1:±170°、 J2:+135°,-100°、 J3:+169°,-119°、 J4:±190°、 J5:±120°、 J6:±360° |
J1:±170°、 J2:+135°,-100°、 J3:+166°,-119°、 J4:±190°、 J5:±120°、 J6:±360° |
J1:±170°、 J2:+135°,-100°、 J3:+169°,-119°、 J4:±190°、 J5:±120°、 J6:±360° |
|||||
| *大可搬运质量 | 7kg(手腕部向下±45°以内)(※4) | ||||||||
| 合成*大速度 | 8200mm/s (工具安装面中心) |
7600mm/s (工具安装面中心) |
8200mm/s (工具安装面中心) |
7600mm/s (工具安装面中心) |
|||||
| 标准循环时间(※1) | 约0.4台(sec) | 约0.5台(sec) | 约0.4台(sec) | 约0.5台(sec) | |||||
| 重复定位精度(※2) | X,Y,Z各方向:±0.02mm (工具安装面中心) |
X,Y,Z各方向:±0.03mm (工具安装面中心) |
X,Y,Z各方向:±0.02mm (工具安装面中心) |
X,Y,Z各方向:±0.03mm (工具安装面中心) |
|||||
| *大容许惯性力矩 | J4、J5周围:0.413kgm2 J6周围:0.063kgm2 (负荷设定7kg时) | ||||||||
| 位置检测方式 | **编码器 | ||||||||
| 驱动电机、制动器 | 带全轴AC伺服电机、J2~J4带制动器 | 带全轴AC伺服电机、J2~J6带制动器 | |||||||
| 用户用气动配管(※3) | 6系統(φ4×6) 电磁阀(2位置、双电磁阀)×3 | ||||||||
| 用户用信号线 | 10芯(近接传感器等的信号线) | ||||||||
| 空气源 | 常用压力 | 1.0×105Pa~3.9×105Pa | |||||||
| *大容许压力 | 4.9×105Pa | ||||||||
| 保护等级 | 等级10(0.1μ) | 等级100(0.3μ) | 等级10(0.1μ) | 等级100(0.3μ) | 等级10(0.1μ) | 等级100(0.3μ) | 等级10(0.1μ) | 等级100(0.3μ) | |
| 空气传播噪音 | 80dB以下(A加权等效连续声压级) | ||||||||
| 质量 | 约35kg (约77lb) | 约36kg (约80lb) | 约35kg (约77lb) | 约36kg (约80lb) | |||||
- 1.负荷1kg时,用机器人将物体举起至25mm的高处,在相距300mm的两点间往返所需的时间。
- 2.重复定位精度是周围环境温度恒定时的精度。
- 3.只有φ4×6可用内置电磁阀控制。
- 4.手腕部向下超过±45°时,*大可搬运质量为6kg。
*大可搬运质量7kg(手腕向下±45°以内)
虽然小巧,但*大可搬运质量达到7kg(手腕向下±45°以内)(*1),马力强劲。提高了设计的自由度。
外形纤细
臂宽110mm,外形纤细,减少了与周边设备之间的互相干扰。
而且,设置面积为“200×200mm”,相当于两张明信片的大小,有助于实现设备小型化。
标准配置工具用空气配管(7条电路)、配线(10芯)、电磁阀
型号丰富
备有在恶劣环境下也可使用的“防尘防滴型”和*适于在无尘自动化环境中使用的“超净型”供选择。
| *大动作领域 | 制动器 | 标准型 |
防尘防溅型[手腕:IP65、主体部:IP54 相当于] |
净化型(*2)[净化度:等级10(0.1μm) 等级100(0.3μm)] |
|---|---|---|---|---|
| 650mm | 标准:234轴 带制动器 |
VS-6556 | VS-6556-W | VS-6556-P |
| 850mm | VS-6577 | VS-6577-W | VS-6577-P | |
| 650mm | 扩张:带全轴制动器 (1轴除外) |
VS-6556-B | VS-6556-BW | VS-6556-BP |
| 850mm | VS-6577-B | VS-6577-BW | VS-6577-BP |
- 1.手腕部向下超过±45°时,*大可搬运质量为6kg
- 3.VS系列可以顶吊(超净机器人不可顶吊)
型号详解
更多产品请咨询:
电装机器人










