
 在线客服
在线客服 企业微信
企业微信








 [VIP第5年] 指数:1
[VIP第5年] 指数:1 通过认证
通过认证
优化的车身车间机器人
是一款线缆内置的高速机器人,动作范围广,具有强大的搬运能力。
BX250L机器人概述:
负载 250 kg
*大臂展 2,812 mm
*大臂展 2,812 mm
应用:
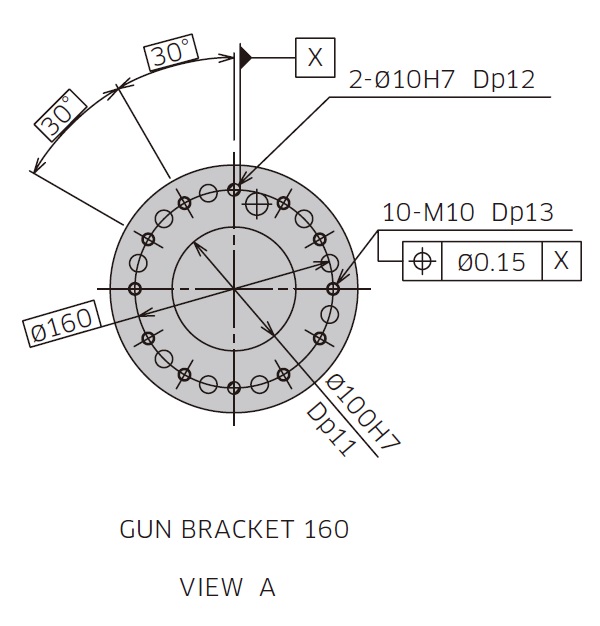
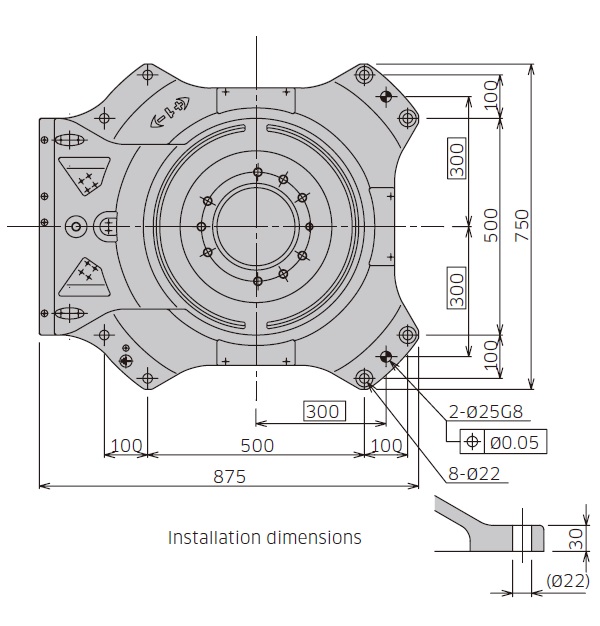
动作范围与尺寸
点击下面的图片来查看。图中所示尺寸单位为毫米(mm)。

BX250L机器人的规格
| BX250L的规格 | |||
| 手臂类型 | 多关节型机器人 | ||
|---|---|---|---|
| 自由度 (轴) | 6 | ||
| *大负载能力 (kg) | 250 | ||
| *大臂展 (mm) | 2,812 | ||
| 重复定位精度 (mm)1 | ±0.07 | ||
| 动作范围 (°) | 手臂旋转 (JT1) | ±180 | |
| 手臂前后 (JT2) | +76 - -60 | ||
| 手臂上下 (JT3) | +90 - -120 | ||
| 手腕旋转 (JT4) | ±210 | ||
| 手腕弯曲 (JT5) | ±125 | ||
| 手腕扭转 (JT6) | ±210 | ||
| *大速度 (°/s) | 手臂旋转 (JT1) | 125 | |
| 手臂前后 (JT2) | 120 | ||
| 手臂上下 (JT3) | 100 | ||
| 手腕旋转 (JT4) | 140 | ||
| 手腕弯曲 (JT5) | 140 | ||
| 手腕扭转 (JT6) | 200 | ||
| 允许负载扭矩 (N?m) | 手腕旋转 (JT4) | 1,800 | |
| 手腕弯曲 (JT5) | 1,800 | ||
| 手腕扭转 (JT6) | 750 | ||
| 允许负载惯量 (kg?m2) | 手腕旋转 (JT4) | 200 | |
| 手腕弯曲 (JT5) | 200 | ||
| 手腕扭转 (JT6) | 165 | ||
| 重量 (kg) | 1,460 | ||
| 安装方式 | 地面 | ||
| 安装条件 | 环境温度 (°C) | 0 - 45 | |
| 相对湿度 (%) | 35 - 85 (无结露) | ||
| 控制柜 / 所需电源 (kVA) | E02/ 7.5 | ||
| 保护等级 | 手腕 : IP67同等 基座 : IP54同等 | ||
1: 以ISO9283为基准。
更多川崎机器人资讯请点击:http://www.kawasakirobotic.m.eepottsltd.com/









