在线客服
在线客服 企业微信
企业微信









Hand-E自适应夹爪
- 该协作机器人抓取器
- 即插即用,易于编程
- 高精度和宽行程
- 精密装配任务的理想选择
robotiq Hand-E自适应夹爪规格参数

应用领域
Robotiq的Hand-E自适应夹爪可以完成各种不同的生产任务。
 质量检测
质量检测
 机器维修
机器维修
 部件
部件
 取放
取放
Hand-E功能
专为协作机器人打造
- 50毫米行程抓爪模型适用于协作机器人
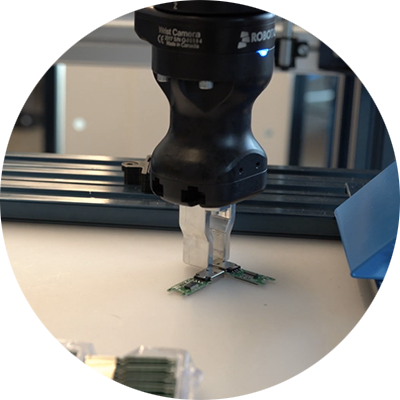
- 与Robotiq的腕式摄像头和FT 300力扭矩传感器无缝集成
- 符合人体工程学的形状,可进行手动操作
易于编程
- 直观的界面,可快速入门和使用
- 无需培训
- 自动零件检测,位置反馈和零件验证
专为工业需求而设计
- **耐用
- 高力和有效载荷
- 承受恶劣的制造条件

加快生产线
通过将多个抓具添加到同一机器人来减少周期时间。

立即安装Hand-E
两个简单的步骤。首先,使用Robotiq的简单机械接口将Hand-E快速连接到您的机器人。其次,将Hand-E直接连接到机器人手腕通讯连接器,以实现市场上*简单,*坚固的集成。

达到前所未有的精度
将Force Copilot与夹持器一起使用,以在CNC夹具内执行可重复的零件定位并执行**的插入装配任务。