
 在线客服
在线客服 企业微信
企业微信








 [VIP第2年] 指数:4
[VIP第2年] 指数:4 通过认证
通过认证
NT系列机器人
用于半导体、有机EL、LCD面板、太阳能面板
长伸展距离水平手臂
NT系列无尘机器人设计的目的是让一个机器人可以伸展开来管护多达四个FOUP而不必使用线性轴。NT系列采用下一代设计,以400晶片每小时(WPH)的速率来搬运300mm或450mm晶圆,而没有使用校准器。
NT系列机器人:
NT410 / NT510单手臂
NT420 / NT520双手臂
NT620悬挂式安装,双手臂
应用:
- 无尘室
无尘机器人外设:
- 抓手
- 校准器NS004
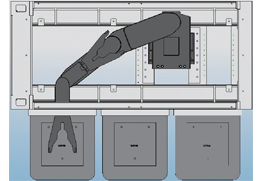
应用范例
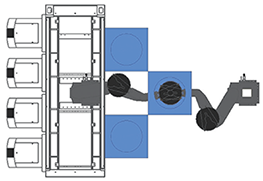
NT系列宽广的运动范围使其能够访问主室,而不需要一个梭子或额外的机器人。
布局范例
一个单个的NT系列机器人能够不使用轨道而只用2到4个FOUP就访问所有的EFEM。
NT系列机器人规格
| 型号 | NT410 | NT420 | NT510 | NT520 | NT620 | |
|---|---|---|---|---|---|---|
| 构造 | 水平多关节型 | |||||
| 自由度 | 4 轴 | 5 轴 | 4 轴 | 5 轴 | 5 轴 | |
| 运动范围 | θ1 轴 (旋转JT2) |
340° | 340° | 340° | 340° | 340° |
| Z 轴 (上下JT3) |
400 mm | 400 mm | 470 mm | 470 mm | 600 mm | |
| θ2 轴 (旋转JT4) |
340° | 340° | 340° | 340° | 340° | |
| H1 轴 (旋转JT6) |
340° (380°)*2 | 340° (380°)*2 | 340° (380°)*2 | 340° (380°)*2 | 340° (380°)*2 | |
| H2 轴 (旋转JT7) |
- | 340° | - | 380° | 380° | |
| *大伸展距离 | 1,230 mm | 1,280 mm | 1,230 mm | 1,280 mm | 1,250.7 mm | |
| 重复性 | ± 0.1 mm (晶圆中心) | |||||
| 无尘度*1 | ISO 1级 | |||||
| 控制柜 | D60/D61 (规格见无尘控制柜) | |||||
*1: 于川崎的无尘间内测得
了解更多川崎机器人









