
 在线客服
在线客服 企业微信
企业微信







 通过认证
通过认证
GSH-6-5
简介:
GSH-6-5型6关节机器人是一款可应用于多种场合的机械手。这种小型机器人因其本身的灵巧性,可适用于快速动作的场合。且容易安装在桌面、轨道或平台上。支持智能示教,编程简单,抓取负载可达5 kg,可用于抛光码垛,拾料,装配,搬运等应用场合。
BO-6-5由广顺伺服驱动器与广顺控制器之间通过CANopen或EtherCAT总线实现数据通讯,集成EUROMAP, 完成六轴联动、圆弧插补、多轴插补。
一、
人工操作缺点:
1、专机结构复杂、维修不便,不利于自动化流水线的生产;
2、不具备柔性加工特点,难以适应产品变化,不利于产品结构的调整;
3、人工劳动强度过大,容易产生工伤事故,效率低下,且使用人工上下料的产品质量的稳定性不够,不能满足大批量、高质量的生产需求。
关节机器人十大优势:
1、降低劳动力和运营成本;
2、提升产品质量与一致性;
3、改善员工的工作环境;
4、扩大产能;
5、增强生产的柔性;
6、减少原料浪费,提高成品率;
7、满足安全法规,改善生产安全条件;
8、减少人员流动,缓解招聘技术工人的压力;
9、降低投资成本,提高生产效率;
10、节约宝贵的生产空间
产品参数
GSH-6-5基本参数 |
|||
GSH-6-5 |
主要应用 |
技术参数 |
|
|
抛光 |
轴数: |
6 |
码垛 |
有效负荷(kg): |
5 |
|
装配 |
控制方式: |
CANOpen,EtherCAT |
|
喷涂 |
工作范围: |
810 mm |
|
组装 |
安装方式: |
落地、挂壁、倒置及任意角度前倾 |
|
搬运 |
重复精度定位(RP)(mm): |
0.03 mm |
|
拾料 |
|||
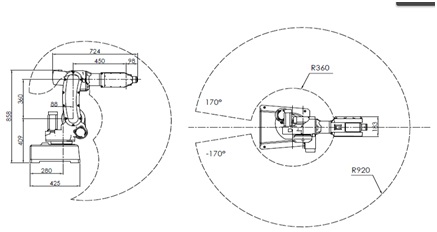
机器人工作范围:
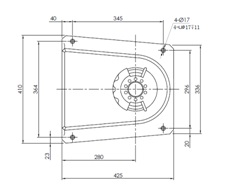
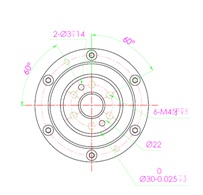
基座尺寸图J6关节分布尺寸图
产品应用:
因末端操作工具的不同,关节机器人可以非常方便的用作各种自动化设备,完成如焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、铸造、装配、贴标、喷码、打码、(软仿型)喷涂、目标跟随、排爆等一系列工作。特别适用于多品种,便批量的柔性化作业,对于稳定,提高产品质量,提高劳动生产率,改善劳动条件和产品的快速更新换代有着十分重要的作用。









