
 在线客服
在线客服 企业微信
企业微信






 [VIP第6年] 指数:4
[VIP第6年] 指数:4 通过认证
通过认证
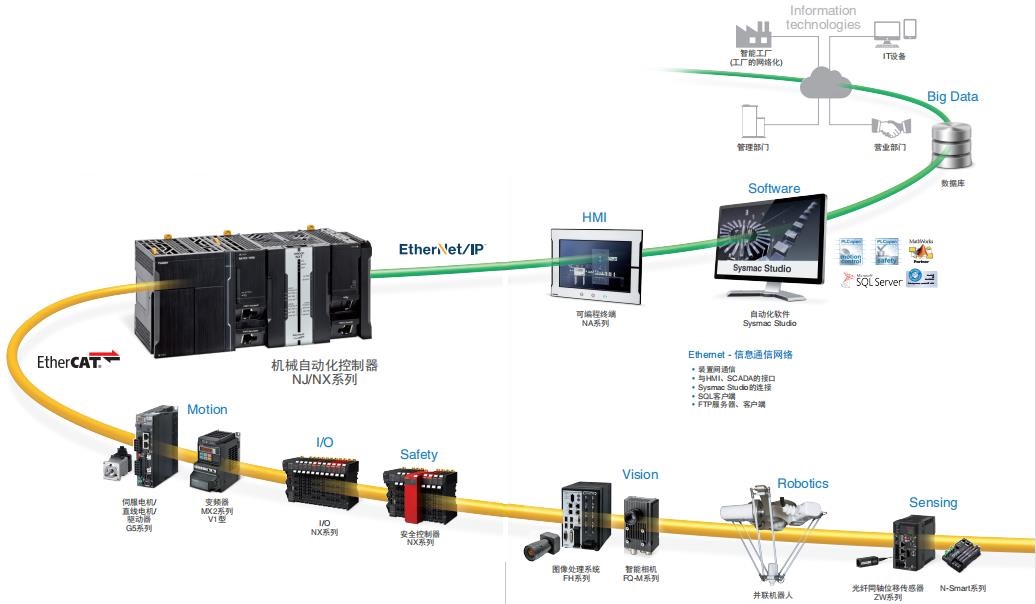
将组成机械所需的各种控制设备汇集于一体,使用一个软件即可进行控制。
这就是Sysmac自动化平台的努力目标。
我们的新型机器自动化控制器NJ系列通过自动化软件Sysmac Studio集成了运动、逻辑、 安全、视觉传感器及网络功能,可进行统一操作。
该Sysmac Studio提供包含3D运动仿真在内的综合开发环境(IDE)。另外,NJ系列控制器 标准配备内置EtherCAT端口和EtherNet/IP端口。通过将这两个网络集成为1个网络,实 现了高速实时机器控制和数据处理机管理。

上海众平科技有限公司以雄厚的技术实力和良好信誉,与世界著名工控产品厂商法国施耐德、日本欧姆龙、瑞典ABB、松下电工、日本横河、罗克韦尔A-B、德国西门子、美国AEG、正泰、德力西等公司建立了长期稳定的技术和商务合作关系。感谢大家一直以来对我公司的信赖与支持,更多详情请登录我司官网gongboshi.org或致电刘孟磊:15600807907 QQ:2024880594
运动、逻辑和视觉集于一体

机器自动化控制器:NJ系列
集合了逻辑控制和高级运动控制功能,实现对机械整体的控制和 管理。
信息通信网络:EtherNet/IP
实现上位系统与机械设备之间的通信及远程访问。
自动化软件:Sysmac Studio
将编程、配置、模拟、监控功能汇集于一个软件。
设备控制网络:EtherCAT
用于实现对变频器、伺服驱动器、I/O、安全和视觉传感器的实时 控制。
本目录中使用的产品照片和图片中包含示意图,可能与实物有所差异。
屏幕截图的使用已获得微软的许可。
One connection
统一、开放的控制网络
机器自动化控制器NJ系列采用以Ethernet为基础的开放式工 业应用网络。可实现机器内部的控制网络和机器与工厂之间 的网络的无缝连接。NJ系列采用世界标准的工业通信规格 的EtherNet/IP和既高速又能连接各种控制设备的以太网为 基础的机器控制网络EtherCAT。
EtherNet/IP:信息通信用开放式网络
·设备间的通信
·与显示器或SCADA软件的接口
·远距离的远程访问
·Sysmac Studio的连接
·SQL客户端
·FTP服务器
·适用于MATLAB? / Simu
EtherCAT:机器控制用开放式网络
·统一进行运动、I/O控制的以太网基础的高速控制网络
·可连接伺服驱动器、视觉传感器、安全、I/O等设备
·*多可连接192个从站
·符合欧姆龙标准的抗噪特性
·采用带RJ45连接器的标准STP屏蔽电缆
将安全集成到机器自动化中
·获得ISO 13849-1, PLe和IEC 61508, SIL3认证
·实现了高柔软性安全分散系统
·安全编程遵从IEC 61131-3标准
·配备的功能框图依据PLCopen?标准获得了T?V认证
·配备Safety over EtherCAT(FSoE),实现安全集成
机器控制网络 EtherCAT
EtherCAT是*适于机器控制的开放式高速网络。
本公司采用EtherCAT作为机器控制的标准网络,从而实现了将运动控制的伺服驱动器、I/O以及现
场网络设备汇集于一体。
EtherCAT是以Ethernet为基础的网络,具有高效的数据传输功能,可实现高速、高精度控制。而且
所有欧姆龙制的EtherCAT设备,都具备极高的耐受现场严酷噪音环境的特性。
| 特长 |
|---|
| ·采用IEEE 802.3标准帧结构的工业以太网 |
| ·具备分布式时钟功能,实现高水平的同步性能 |
| ·*快100μs的刷新时间和不超过1μs的时基误差的高速通信性能 |
| ·从站构成的自动检测,轻松实现系统构建 |
| ·采用标准Ethernet电缆和连接器,方便布线 |
| · 通过配备Safety over EtherCAT(FSoE),网络以相同电缆获得安全认证 |
| ·向EtherCAT机器网络提供安全对策的无缝集成 |
工业以太网
EtherCAT的收、发数据采用IEEE802.3的Ethernet帧数据组,以全双工通信方式的100Mbps进行通信。
Safety over EtherCAT (FSoE)
FSoE帧包含在EtherCAT过程数据中,可实现安全控制的自由分散,将对高速高精度自动化控制的影响降到*低。
On-the-fly数据通信
EtherCAT从站设备在让通信帧高速通过的瞬间,执行各自的数据交换。通过这种方式,EtherCAT保证了高通信总处理能力。
轻松布线
EtherCAT有效运用标准的100BASE-TX通信方式,可利用标准的屏蔽式Ethernet电缆与连接器。并且,基本接线无需使用网络用开关。
分布式时钟
EtherCAT从站设备通过时戳功能计算数据传送过来的时间差,并调节刷新时间。使用该时戳功能,主时钟便可精确管理并补正对各从站设备的数据传输延迟量。通过此机制,可实现设备间的1μs高精度同步性。
灵活的拓扑结构
EtherCAT设备具有2个端口,因此,无需额外的开关等器件,相互之间便可直接连接。还可利用EtherCAT分支从站进行树形或星形结构的布线,从而通过分支减少布线。
One software
进一步提升机器控制设计的创造力
自动化软件 Sysmac Studio将控制设计工作向更具创造力的方向发展。
缩短编程、设定、调试的作业时间及步骤,更加集中于对机器性能与功能的提升。
Sysmac Studio是一款以控制机器整体为目的而开发的软件。
更是一个简单易学,并将综合开发、测试和调整工作融为一体,*终帮您实现高安全控制的软件。

Learn it ONCE
简单易学
·整合运动、逻辑、安全、驱动器和视觉传感器支持功能的 一体化软件
·兼容开放程序的国际标准IEC 61131-3
·统一编程、环境设定、监控的用户接口
Develop it FAST
高速开发
·通过完全适应变量的指令语,全面支持梯形图语言、ST语言 与功能块编程
·搭载可轻松设定复杂运动控制的凸轮编辑器
·通过开发机型基座,适用于模拟控制系统的simu
支持MathWorks公司的Simu
Test it as ONE
综合测试环境
·实现逻辑与运动一体化的模拟、调试
·实现运动动作的2D、3D显示
·用于调谐和调试的数据跟踪功能
Secure it ALL
绝对安全功能
·带32位安全密码的先进安全功能
·可对每个项目进行设定的保护功能
·可防止机克隆功能
自动化软件Sysmac Studio
Sysmac Studio集成了配置(结构设定)、编程和监控功能,以实现 对机器的一体化控制。
采用图形的配置画面,可缩短控制器、网络、连接设备的设置时 间。并且,在采用了符合IEC标准、PLCopen?的运动控制功能块的 编程环境中,可明显缩短编程时间。带联机调试功能的编辑器,可 实现快速且差错极少的编程。另外,采用可整合并执行顺序控制和 运动控制的先进仿真功能,可明显缩短机器的调整时间。
操作简便
·实现配置、编程、监控的一体化开发环境
·统一用户接口,并实现直观的动作路线
驱动设备的设定、监控
·可实现伺服驱动器及变频器的参数设定及数据监控、 数据跟踪

编程
支持多任务编程,并完全符合IEC 61131-3标准。程序编辑器包含语法错误检查、变量、指令输入辅助及颜色识别功能等各种丰富的开发支持功能。还实现了可在梯形图程序中直接写入ST语言的联机ST功能。

安全编程
配备了获得安全认证的PLCopen?标准的功能框图*
配备了简化复杂安全设备设定的支援功能,如错误非安全信号适用检查等,大幅降低了获得安全认证的工时
* 计划近期获得

运动控制
·图形凸轮编辑器可轻松实现对复杂运动动作的设计。
·凸轮表可在动作中实时进行修正。
·采用符合PLCopen?标准的运动控制功能块库,轻松实现主要运动控制。

数据跟踪
将I/O状态及运动位置、速度信息进行同步,通过整合的数据跟踪功能,轻松实现机械调整、调试。
仿真
利用运动轨迹的3D监控,可对时序和运动进行精准的动作理论验证。
可对单个功能块、POU及程序整体进行仿真。另外,还搭载了中断&步执行功能等标准功能。
机器自动化控制器NJ系列
无与伦比的高速性与可靠性并重
机器自动化控制器NJ是Sysmac自动化平台的核心控制器。在PLC长年积 累的可靠性与牢固性的基础上,实现了兼具高速性、对控制的广泛适应性 及软件库的灵活扩展性的综合型机器控制器。NJ系列兼备高性能机器控制 必备的运动性能与精度、通信、安全、可靠性。我们将竭尽全力,为客户 集中开发优异的机器产品贡献力量。
| 特长 |
|---|
| ·系统周期:32轴/500μs |
| ·*多64轴的运动控制 |
| ·内置EtherNet/IP和EtherCAT |
| ·*多可支持192节点的EtherCAT从站(含轴) |
| ·符合IEC 61131-3标准的标准化编程环境 |
| ·支持符合PLCopen?标准的运动控制功能块 |
| ·直线、圆弧等的插补动作功能 |
| ·电子齿轮、电子凸轮的同步动作功能 |
| ·符合国际标准规格CE、cULus、NK、LR |

单元类型
| CPU单元 | 单元类型 | 轴数 |
|---|---|---|
| NJ501 | 标准、机器人技术、SQL客户端 | 16,32,64 |
| NJ301 | 标准 | 4,8 |
运动控制
·*多64轴的控制
·单轴动作、多轴的插补动作功能
·32轴/500μs的周期时间
·电子凸轮、电子齿***能
·On-the-fly方式的电子凸轮
·轴组位置的完全控制
·控制*多8台/2ms、*多4台/1ms的三角机器人
·面向Delta-3控制的整合机器人技术功能块库
系统可靠性
·配备异常记录功能,可对控制器、现场网络设备、网络的信息与错误进行集中管理
·与PLC同等的系统监视功能:WatchDog定时器功能、内存检查功能、网络监视功能
机器控制
·**结合逻辑、运动、安全及视觉传感器
·所有机器网络装置的同步控制
·多任务编程
·联机ST、结构化文本、梯形图的融合
·I/O容量:2,560本地点和192EtherCAT从站
硬件
·搭载Intel?Atom?处理器
·业界*小级别的控制器
·内置USB端口、SD卡槽
·实现了免风扇结构
信息通信用开放式网络

·设备间的通信
·HMI
·编程
·标准协议、服务:TCP/IP, FTP, NTP,SNMP
·CIP协议
·DB连接功能块:SQL客户端
机器控制用开放式网络

·伺服电机系统
·变频器
·机器人技术
·视觉传感器
·分散I/O单元
标准编程

·兼容开放程序的国际标准IEC 61131-3
·支持符合PLCopen?标准的运动控制功能块
NX I/O
用于机器的高速高精度控制
NX I/O以与EtherCAT网络同步的内部高速总线为基础,通过时戳功能,可按照μs精度控制输入输出。
在数字输入输出、模拟输入输出的基础上,位置接口、温度输入、安全CPU、安全I/O等70种以上的单元形成丰富的产品系列。
| 特长 |
|---|
| ·NsynX技术实现了高速高精度I/O响应 |
| ·数字I/O:高速、时戳机型(NsynX) |
| ·模拟I/O:配备每通道转换时间10μs和30000分辨率的高功能机型 |
| ·采用可插拔式无螺钉紧固端子 |
| ·通过Sysmac Studio的整合式设计,可进行故障诊断 |

| NsynX技术 |
|---|
| 通过与NJ控制器和EtherCAT网络同步的内部高速总线实现了NsynX技术。该技术有助于高速、高精度的机器控制。 · 同步刷新型I/O单元与EtherCAT周期同步,输入输出数据。 · 带时间戳功能的I/O单元的输入输出响应速度偏差为1μs。 
|
以纳秒等级获取时间信息,控制输出
EtherCAT连接
·切实实现1μs速度偏差以下I/O响应的分布式时钟
·适用于Safety over EtherCAT(FSoE)
EtherCAT通信耦合器单元
·*多1024字节输入/1024字节输出
·所有I/O单元参数自动备份/恢复(安全控制单元和安全I/O单元除外)
数字I/O单元
·4、8、16点单元
·标准、高速、时刻指定功能型

·高密度封装、12mm宽,*多16点
模拟I/O单元
·+ / - 1 0 V 电压和4-20mA电流信号
·2、4、8点的输入单元
·2、4点的输出单元
·标准、高功能机型
安全I/O单元*
·安全输入单元4、8点
安全输出单元2、4点
·可通过内部高速总线自由组合安全I/O
位置接口单元
·与Sysmac系统进行外部轴连接的编码器输入单元
·支持增量、绝对值编码器
·编码器输入、脉冲输出单元
温度输入单元
·热电偶*、测温电阻体连接的2点/4点型

·无螺钉紧固端子台
·快速、可靠的无螺钉推入型结构
·便于事前接线、接线检查及系统维护的拆装式端子台
安全控制器 NX系列
在机器自动化的基础上追加、整合了安全功能
Sysmac自动化平台以One connection、One software为理念,在机器自动化的基础上追加、整合了安全功能。
搭载Safety over EtherCAT(FSoE)协议,通过EtherCAT与机器自动化控制器等机器连为一体。另外,Sysmac Studio也实现了编程环境的整合。
安全控制器NX系列由安全CPU单元和安全I/O单元构成,可与标准I/O单元NX系列自由组合。

| 特长 |
|---|
| · 获得ISO 13849-1(PLe/安全类别4)、IEC61508(SIL3)认证 |
| · 可同时使用安全CPU单元、安全I/O单元和标准I/O的柔性系统 |
| · 通过Sysmac Studio的整合式设计 |
| · 已认证的程序可再次使用。削减认证工时 |

将安全整合到One Software中
·依据IEC 61131-3标准,便于通过变量与NJ之间进行程序联动
·搭载了PLCopen?安全功能框图
·将安全程序编辑器分离为NJ用,获得安全认证程序的再利用性高
·配备了轻松直接连接各种安全设备的设定支援功能,如错误非安全信号的适用检查等,大幅降低了获取安全认证的工时
安全I/O单元
·安全输入单元 4点、8点等2种4点型可直接连接各种安全输入设备
·安全输出单元 2点、4点等2种2点型的输出电流容量大,达2A/点
*1. 程序容量以大小加以规定,记载了大致标准。
伺服电机/驱动器 G5系列
更高速驱动机器的巅峰伺服
制造*好机械时,需要实现机械和控制的协调。G5系列,能够以更高速度、高精度,制造更小的安全机械。
| 特长 |
|---|
| ·EtherCAT通信功能内置型紧凑型伺服驱动器 |
| ·高响应频率 2kHz |
| ·制振控制功能 |
| ·符合安全标准ISO13849-1(PLc,d) |
| ·高级调谐算法(制振功能、转矩前馈功能、外部干扰观测功能) |
| ·线性、回转型伺服电机的种类丰富齐全 |

EtherCAT连接
依据CoE-CiA402驱动器曲线
·周期性同步位置模式、速度模式、转矩模式
·电子齿***能、原点复位模式、曲线位置模式
·保证高精度同步的分布式时钟
(Distributed Clocks)

提高装置安全性
ISO13849-1(PLc,d)
STO: IEC61800-5-2
EN61508(SIL2)

改善电机性能
·低齿槽转矩
·通过20bit编码器实现高精度控制
·所有容量的电机、连接器 IP67适用
·适用于大范围转矩(从0.16N·m到96N·m、*大转矩224N·m)的电机产品种类丰富

不带铁芯型直线电机
·小型、高效的设计
·重量轻、高速动作
·无齿槽、速度稳定性优异

带铁芯型直线电机
·小型、扁平的设计
·推力和规格的*佳化
·重量轻、推力高
变频器 MX2系列V1型/RX系列V1型
专注于响应时间的机器控制用变频器
MX2系列V1型/RX系列V1型是适用于Sysmac自动化平台、*适用于机器控制的变频器。MX2系列V1型基于高级设计技术和算法,通过顺畅的减速停止功能及周期控制可实现正确的动作,通过开环可实现转矩控制。RX系列V1型性能较高,备有可满足丰富应用的功能及定制功能,可满足高精度要求。
MX2系列 V1型

| 特长 |
|---|
| ·产品种类包括15kW以下产品 |
| ·适用于开环控制转矩 |
| ·低频(电机额定转矩比)下的高功率运转(0.5Hz时200%) |
| ·可选择双重额定(重载CT/轻载VT) |
| ·IM、PM电机控制 |
| ·驱动编程 |
| ·为方便与控制板通信,提供DC24V备用 |
| ·内置制动器控制功能 |
开环控制转矩
·*适于定位控制类简单的转矩管理
·在无传感器矢量控制下,还可实现转矩限制功能
高速响应负载转矩变动

· 不会降低装置的速度,控制稳定,有助于提高生产效率
RX系列 V1型

| 特长 |
|---|
| ·产品种类包括132kW以下产品 |
| ·无传感器矢量控制、带PG矢量控制 |
| ·启动转矩为200%/0.3Hz(开环) |
| ·在0Hz域内确保高转矩(闭环) |
| ·双重额定(重载CT/轻载VT) |
| ·驱动编程 |
| ·内置电子齿***能 |
电机效率控制
·双重额定(重载CT/轻载VT)
·节能功能
200%启动转矩
·在接近停止(0.5Hz)的状态下实现(无传感器矢量时)
·开环高速启动转矩控制
·实现流畅、快速的负载控制











