
 在线客服
在线客服 企业微信
企业微信






 通过认证
通过认证
一体化电机-iDT5系列

产品简介


? iX servo controller and servo motor in a single compact unit ? Continuous power up to 5 kVA ? EtherCAT and Sercos III ? Loopable M23 power connection ? Functional Safety ? Absolute minimum of cabling effort ? No distributor box and no hybrid cable ? Local I/Os ? IP65
详细资料
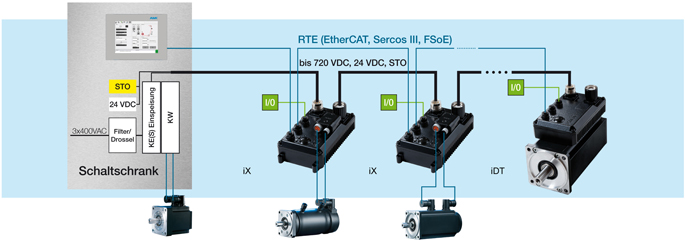
Decentralized drive solution for the most stringent requirements
The AMKASMART iDT series features a DT synchronous motor with integrated servo controller. They are a plug-and-play solution for modular machine concepts. The system combines mechanics, electronics, and software for decentralized uses. The AMKASMART iDT series is available up to a peak power of 10 kW.
Sercos III or EtherCAT is used for real-time Ethernet communication. The looping through of power supply and communication lines from iDT to iDT minimizes the cabling effort.
属性
·
Real-time Ethernet (EtherCAT, Sercos III)
·
5 multifunctional I/Os
·
M23 power connector, loopable
·
Up to 720 VDC power supply
·
Protection class IP65
·
Absolute encoder
·
No distributor box or hybrid cable
·
Absolute minimum of cabling expense
·
STO – Safe torque off integrated
·
Functional safety optional
功能
·
Torque control
·
Speed control
·
Position control
·
Cyclic filter
·
Position setpoint filter
·
Load model
·
Homing cycle
·
Parameter management
·
Monitoring
·
Protective functions
技术数据
|
Motor type
|
Mmax
[Nm]
|
Imax
[Arms]
|
Mo
[Nm]
|
Io
[Arms]
|
MN
[Nm]
|
InN
[Arms]
|
nN
[1/min]
|
PN
[W]
|
J
[kgcm?]
|
L
[mm]
|
L/LBR
[mm]
|
m
[kg]
|
|
iDT5-3-10-xxO
|
7,7
|
8,5
|
2,2
|
2
|
1,36
|
1,2
|
4500
|
641
|
1,6
|
163,5
|
191,5
|
4,5
|
|
iDT5-5-10-xxO
|
9,6
|
8,5
|
3,8
|
3,3
|
2
|
1,7
|
3500
|
733
|
2,9
|
195
|
223
|
5,7
|
|
iDT5-9-10-xxO
|
14,1
|
8,5
|
7,1
|
4,6
|
3,3
|
2
|
3000
|
1037
|
5,5
|
258
|
286
|
8,3
|
Explanation of characteristic values:
M max Maximum torque ·I max Maximum current ·M o Continuous stall torque ·I o Continuous stall current ·M N Nominal torque ·
I N Nominal current ·n N Nominal speed ·P N Nominal power ·JMoment of inertia ·LMotor length ·L BR Motor length with brake ·
mWeight
M max Maximum torque ·I max Maximum current ·M o Continuous stall torque ·I o Continuous stall current ·M N Nominal torque ·
I N Nominal current ·n N Nominal speed ·P N Nominal power ·JMoment of inertia ·LMotor length ·L BR Motor length with brake ·
mWeight









