
 在线客服
在线客服 企业微信
企业微信







-
又称Delta并联蜘蛛手承载能力强、刚度大;自动负载比小、动态性能好;重复定位精度高、一秒钟多个节拍;无控制箱的机器人,结构简单开源代码,开放式平台,便于用户学习及集成
-
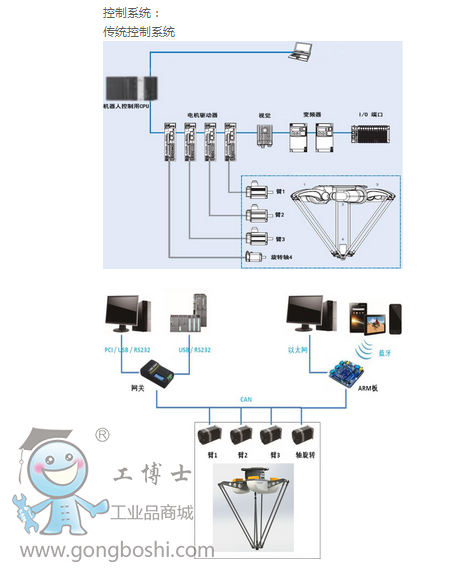

功能: 分拣、抓取、搬运、封装物件。
结构:一种Delta并联机器人,包括基座固定板,基座固定筒,三叶板,中轴驱动电机模组,中轴电机护罩,摇臂驱动电机模组(3个),摇臂电机护罩(3个),摇臂(3个),摇臂轴中心盖板(3个),拉杆(6根),工具端台,中轴管和滚珠花键。
特色: 三叶板叶片根据各伺服驱动电机模组外形定做而成,结构明快,易于安装;摇臂、三叶板、中轴管、滚珠花键的设计充分考虑了轻量和美观,整体性好,减少安装误差;电气线路集成在一块电路板上,减少接线环节,结构紧凑,控制方便;WIFI和蓝牙方式的添加,除了通过传统的工控机进行编程控制,还可通过智能移动终端如个人平板,手机等进行编程控制,实现了低成本,易维护,易使用。









