
 在线客服
在线客服 企业微信
企业微信









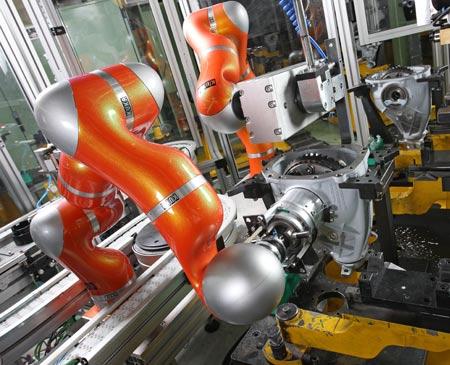
装配机器人是柔性自动化装配系统的核心设备,由机器人操作机、控制器、末端执行器和传感系统组成。机器人的结构类型有水平关节型、直角坐标型、多关节型和圆柱坐标型等;控制器一般采用多CPU或多级计算机系统,实现运动控制和运动编程;末端执行器为适应不同的装配对象而设计成各种手爪和手腕等;传感系统又来获取装配机器人与环境和装配对象之间相互作用的信息。
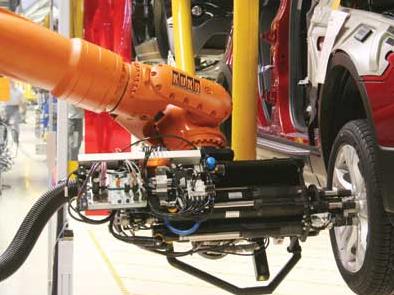
装配机器人主要用于各种电器制造(包括家用电器,如电视机、录音机、洗衣机、电冰箱、吸尘器)、小型电机、汽车及其部件、计算机、玩具、机电产品及其组件的装配等方面。
装配机器人特点
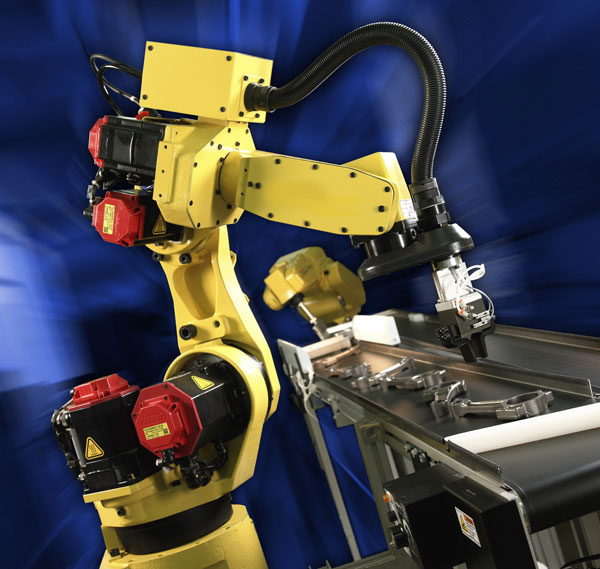
每台组装机器人手臂可根据工艺需要配备不同工装,以满足未来生产线多批次、小批量的多样生产要求,只需要简单地编程及工装更换即可实现快速切换。
机器人的高精度与作业的稳定性,可用于精益工业生产过程。
装配力控制。利用智能力/转矩运动技术进行零部件装配,同时消除了零件卡死和损坏的风险。
视觉功能,引导机器人正确识别和抓取工件,传送到精确装配位置。
机器人投入产出比高,设备回收期短。
更多机器人装配相关应用
机器人点胶: 点胶作业需要的材料被移动从一个位置到另一个位置。的一致,准确的动作的工业机器人使它们非常适合配药。
机器人密封: 粘接和密封是在生产过程中使用粘合剂或密封剂的过程。粘接和密封的机器人可用来增加期望这一进程的速度和准确性。机器人粘接和密封被广泛地用于组装电器小部件、电子元件表面贴装、汽车部件贴装等,具有广泛的工艺应用。










