
 在线客服
在线客服 企业微信
企业微信







 [VIP第7年] 指数:8
[VIP第7年] 指数:8 通过认证
通过认证
欧姆龙视觉传感器FZM1经过优化,可以高速和高精度检测机器内部任何物体的位置和方向。这有助于提高生产效率。
针对定位应用而优化的新一代图像处理技术和直观的用户界面。使用通过EtherCAT或UDP的高速通信可轻松与欧姆龙和其他供应商的运动组件互相作用。这将提高从定位到控制的整体性能。
视觉—为取放量身定制
(精确)在变化条件下的稳定测量
更可靠的运行意味着更少由于检测错误的停机时间以及更高的产量。
这不仅仅是满足了现场需求和提高系统性能。

[在光干扰情况下检测对齐标记]

业内*高的检测性能
已加入针对定位而优化的处理项目,以处理多种测量物体。
只需为目标物体选择正确的处理项目,便可进行稳定的检查而无需复杂的计算和设定。
用对齐标记的定位
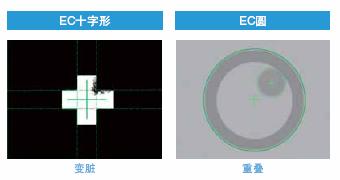
精确检测制造液晶面板和PCB常用的对齐标记,即便这些标记变脏或部分隐藏,也可进行准确的检测。
用边角检测的定位
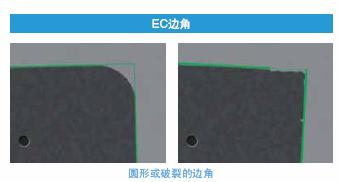
可通过检测测量物体的边角来执行定位。现在,即便圆形边角或边缘破裂时,也可进行稳定的检测。这是无法打印对齐标记的玻璃板、液晶显示器和其他物体的理想选择。
按物体的形状定位
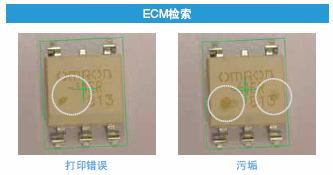
拾取电子元件或食品时,不清晰的打印和污垢可导致无法进行稳定的检查。FZM1可根据物体的形状识别其位置和方向,使用ECM检索处理可进行精确的位置和姿势测量,而不受表面情况的影响。
在严峻条件下优异的性能
EC: 边缘代码
图像处理技术
专利编号 11-550303
常规检索处理和图形匹配基于密度差异或在模型图像上注册的特征点检测物体。测量物体更改或形状不一致时,这将导致不稳定的检测。
使用EC图像处理,可将测量物体作为几何形状识别,以将光干扰或污垢导致的检查位置偏移*小化。这样将实现稳定、标准的位置检测。
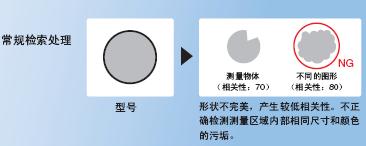

亮度的变化将作为边缘代码识别,并且通过几何计算确定圆和圆周边缘的中心。即便圆破裂,它也识别为圆,即测量物体。区分测量区域内的污垢和其它异常,使其不会被误检测。
(轻松) 从定位的困境中解脱
[配线和设计] 采用EtherCAT的下一代高速通信
通过对EtherCAT开放式网络的支持可实现实时的远程I/O控制。可通过EtherCAT通信到欧姆龙PLC或其他EtherCAT组件,以执行高速的运动控制。
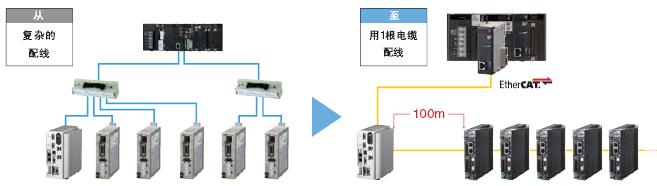
使用Ethernet电缆时更少的配线
所有触发输入和结果输出仅使用1根Ethernet电缆执行。这将消除多余的配线工作,并且有助于在启动系统时防止配线错误。使用EtherCat可配线长达100m而无需转发器,轻松连接视觉传感器和伺服驱动器。
减少梯形编程

PLC链接功能使用3个链接区通信:即命令区、响应区和数据输出区。只需读取及写入分配到PLC的I/O内存中的字,PLC即可用传感器控制通信。这将极大减少通信所需梯形编程的数量。
什么是EtherCAT?
EtherCAT是一种基于Ethernet 、可进行实时控制的开放式网络。它是包括运动控制的机器控制网络的理想选择。EtherCAT提供实现超高速同步控制所需的操作原理和体系结构,以及实现配线效率的总线拓扑结构,它解决了需要许多集线器和开关的Ethernet传统上的复杂配线问题。欧姆龙将EtherCAT应用于FA现场所需的高速、 高精度机器控制网络,并且将在未来推出更多的EtherCAT产品。
[照相机调节] 焦距和光圈调节
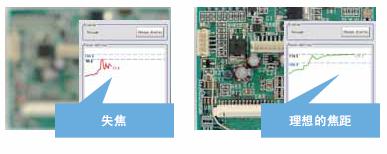
过去基于经验和直觉调节的焦距和亮度已用数字表达,并且在图表中显示,完全一目了然。
几乎任何人都可快速调节理想的焦距和光圈。可消除不同操作人员之间的变化,并且获得更大的检查精度。
[坐标转换] 简单的自动校准
直觉传感器提供针对不同镜台和机器人的坐标转换功能。无需繁琐的计算便可为视觉传感器和输出设备转换坐标。
处理各种镜台和机器人

灵活的照相机安装
即便对于使用2个照相机的对齐系统,也没有关于照相机安装的限制。可计算照相机角度和视野的差异并且转换坐标,而无需在PLC或其它外部设备中执行复杂的计算。
通过应用程序向导的轻松设置和配置
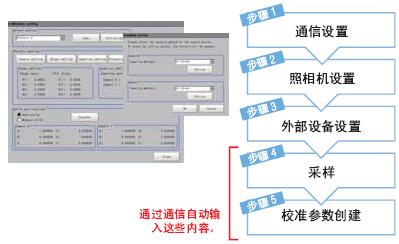
利用向导可轻松设置照相机与镜台或机器人之间的校准。只需选择检查类型,即可轻松生成校准参数。通过EtherCAT或UPD从外部设备自动输入采样数据,以消除手动输入中可发生的错误。还可针对生产变化或现场需要的设置调节快速且准确执行微调。
(快速)更快的图像采集和处理
高速照相机的产品阵容
30万像素照相机采集图像的速度已极大提高。即便使用200万像素照相机,图像采集速度也相当于标准30万像素照相机的速度。在需要宽视野、高精度和高速的应用中差别*为明显。

ECM以20倍的速度检索
FZM1提供欧姆龙独有高速检索处理的高级版本,即ECM。高速检索处理现在可用于在不同方向传送的多个测量物体。这样可对移动物体进行高速取放处理。
[旋转物体的检索速度]

* 在欧姆龙测试条件下的单个工作。









