
 在线客服
在线客服 企业微信
企业微信








 [VIP第2年] 指数:1
[VIP第2年] 指数:1 通过认证
通过认证
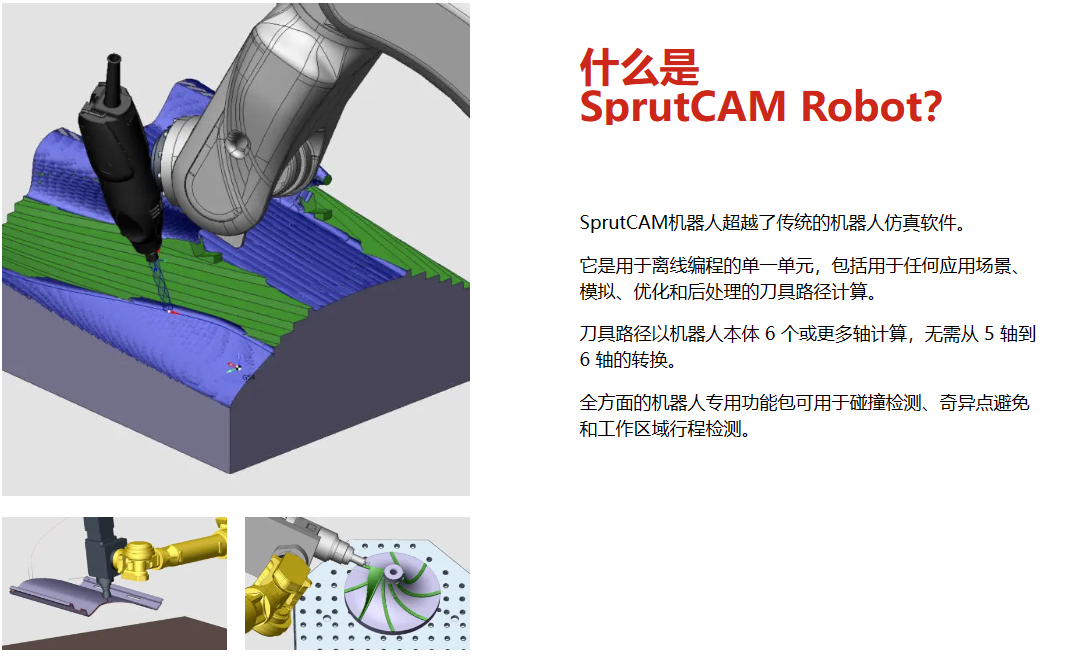
用于工业机器人离线编程的单一平台软件
我们为全球机器人工程师提供
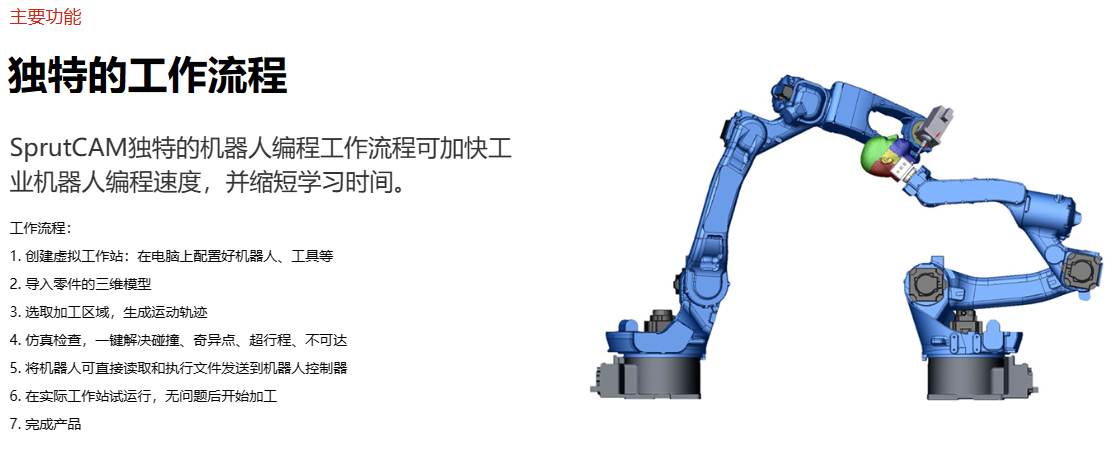
简化的
工业机器人编程工作流程
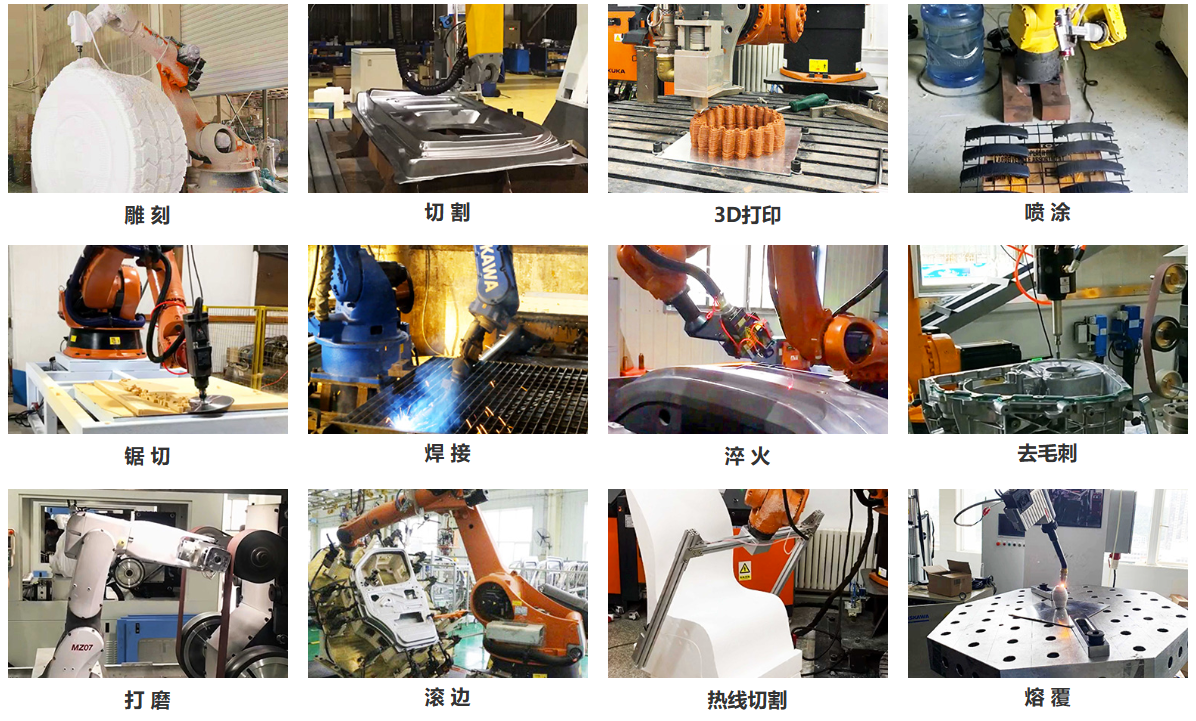
机器人离线编程的典型应用场景

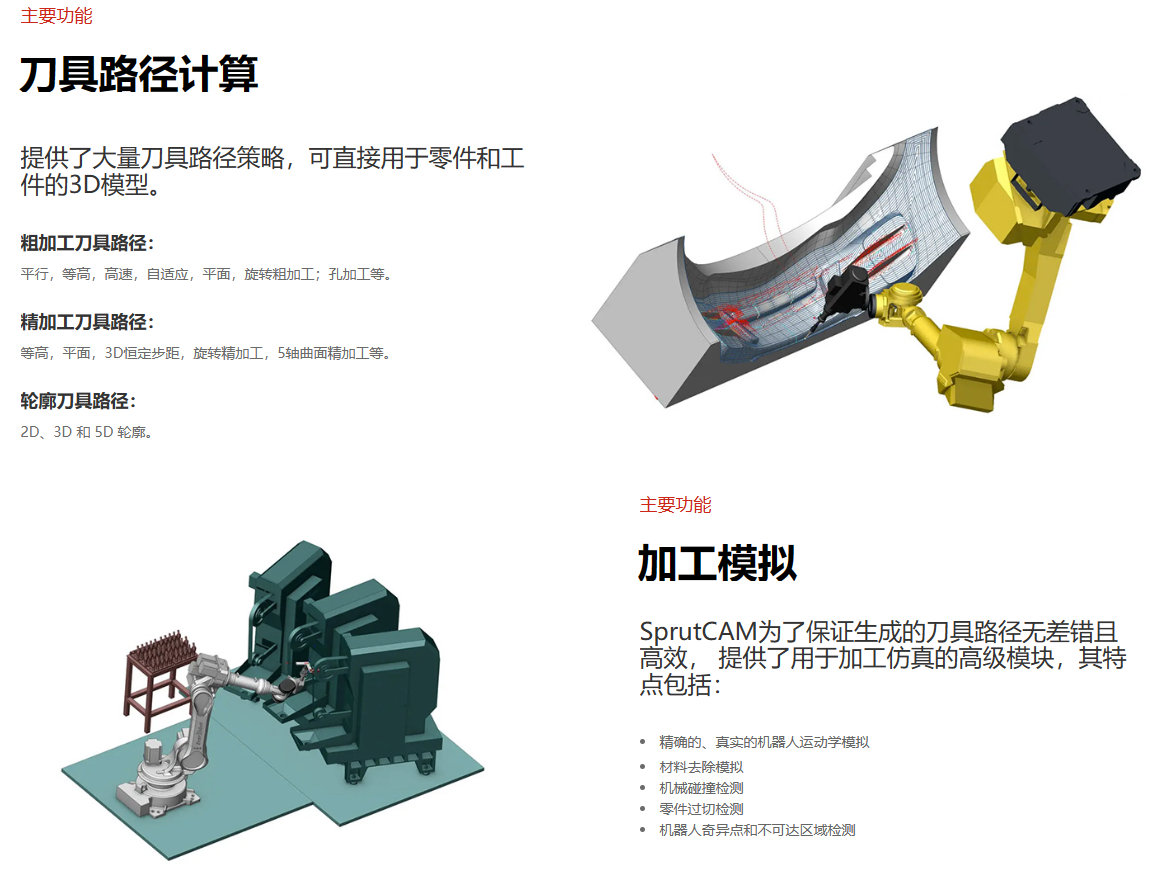
根据机器人运动学算法生成所有刀具路径,可自动或手动优化机器人的每个轴,以扩展加工区域、避免碰撞或改善加工条件。








根据机器人运动学算法生成所有刀具路径,可自动或手动优化机器人的每个轴,以扩展加工区域、避免碰撞或改善加工条件。













