
 在线客服
在线客服
 企业微信
企业微信









 [VIP第5年] 指数:1
[VIP第5年] 指数:1 通过认证
通过认证 
MC004N机器人
医疗与制药机器人
随着高龄化问题的日益突出,新药品的需求也越来越大。制药·医疗现场人工作业会有出现操作失误或是微生物混入的风险,同时抗癌药剂等高药理活性医药品的保存等也会对人体有辐射风险。为避免此类事件的发生,机器人自动化的呼声也越来越大。MC系列就是为制药·医疗行业而开发出来的药用机器人。
更多川崎机器人资讯请点击:http://www.kawasakirobotic.m.eepottsltd.com/
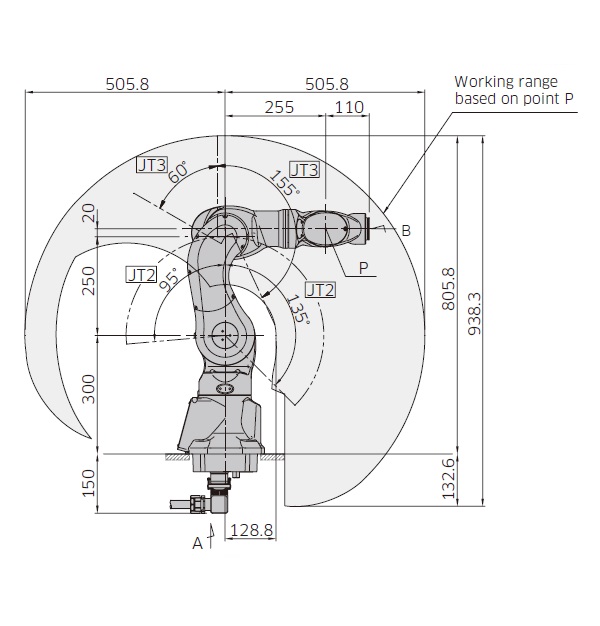
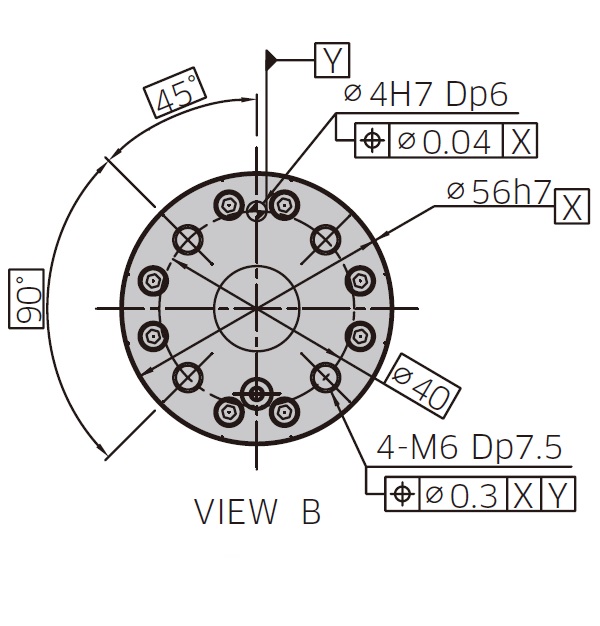
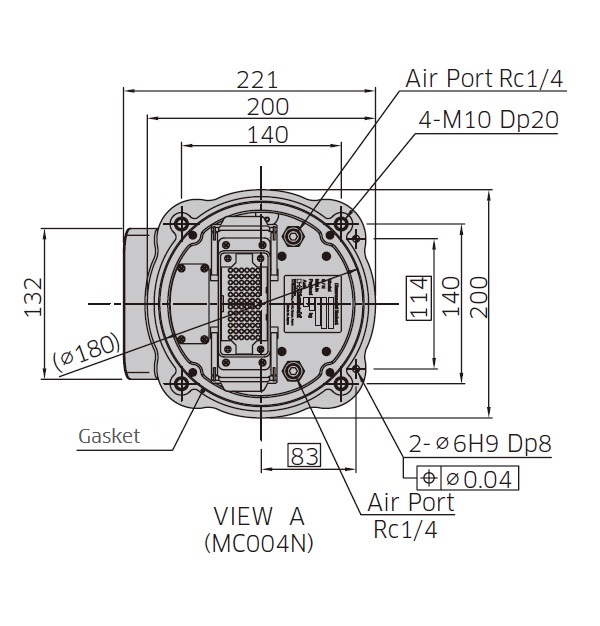
动作范围与尺寸
点击下面的图片来查看。图中所示尺寸单位为毫米(mm)。
MC004N机器人的规格
| MC004N的规格 | |||
| 手臂类型 | 多关节型机器人 | ||
|---|---|---|---|
| 自由度 (轴) | 6 | ||
| *大负载能力 (kg) | 4 | ||
| *大臂展 (mm) | 505.8 | ||
| 重复定位精度 (mm)1 | ±0.05 | ||
| 动作范围 (°) | 手臂旋转 (JT1) | ±180 | |
| 手臂前后 (JT2) | +135 - -95 | ||
| 手臂上下 (JT3) | ±60 - -155 | ||
| 手腕旋转 (JT4) | ±270 | ||
| 手腕弯曲 (JT5) | ±120 | ||
| 手腕扭转 (JT6) | ±270 | ||
| *大速度 (°/s) | 手臂旋转 (JT1) | 200 | |
| 手臂前后 (JT2) | 180 | ||
| 手臂上下 (JT3) | 225 | ||
| 手腕旋转 (JT4) | 700 | ||
| 手腕弯曲 (JT5) | 500 | ||
| 手腕扭转 (JT6) | 350 | ||
| 允许负载扭矩 (N•m) | 手腕旋转 (JT4) | 8.5 | |
| 手腕弯曲 (JT5) | 8.5 | ||
| 手腕扭转 (JT6) | 4.0 | ||
| 允许负载惯量 (kg•m2) | 手腕旋转 (JT4) | 0.2 | |
| 手腕弯曲 (JT5) | 0.2 | ||
| 手腕扭转 (JT6) | 0.1 | ||
| 重量 (kg) | 25 | ||
| 安装方式 | 地面, 悬挂 | ||
| 安装条件 | 环境温度 (°C) | 10 - 35 | |
| 相对湿度 (%) | 35 - 85 (无结露) | ||
| 控制柜 / 所需电源 (kVA) | F60 / 2.0 | ||
| 保护等级 | 手腕: IP67同等 基座: IP65同等 | ||
| 清洁度 | ISO Class5 | ||
1: 以ISO9283为基准。
更多川崎机器人资讯请点击:http://www.kawasakirobotic.m.eepottsltd.com/









