
 дкЯпПЭЗў
дкЯпПЭЗў ЦѓвЕЮЂаХ
ЦѓвЕЮЂаХ








 [VIPЕк5Фъ] жИЪ§:4
[VIPЕк5Фъ] жИЪ§:4 ЭЈЙ§ШЯжЄ
ЭЈЙ§ШЯжЄ
ЖЏзїЗЖЮЇгыГпДч
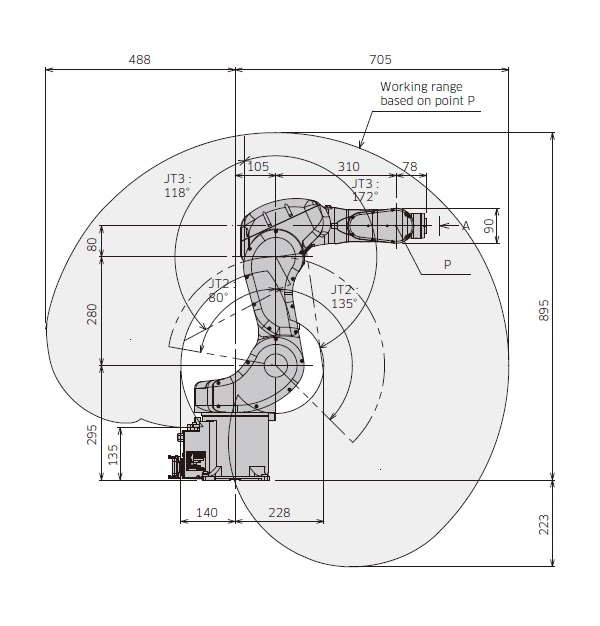
ЕуЛїЯТУцЕФЭМЦЌРДВщПДЁЃЭМжаЫљЪОГпДчЕЅЮЛЮЊКСУзЃЈmmЃЉЁЃ

RS005NЕФЙцИё
| RS005NЕФЙцИё | |||
| ЪжБлРраЭ | ЖрЙиНкаЭЛњЦїШЫ | ||
|---|---|---|---|
| здгЩЖШ (жс) | 6 | ||
| *ДѓИКдиФмСІ (kg) | 5 | ||
| *ДѓБлеЙ (mm) | 705 | ||
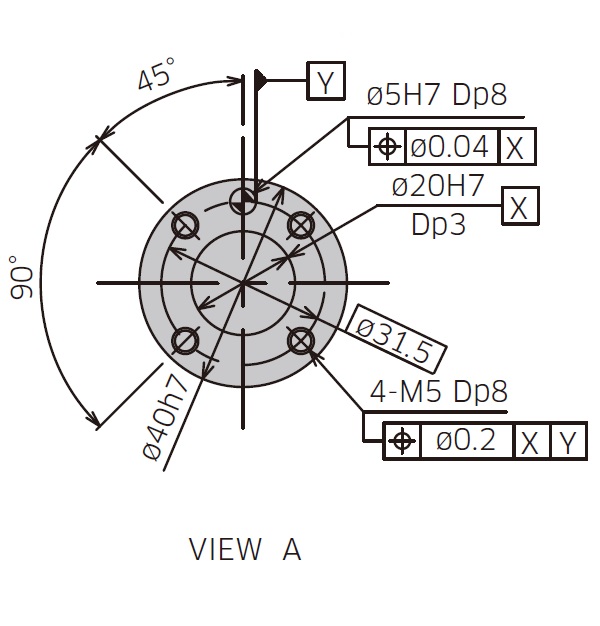
| жиИДЖЈЮЛОЋЖШ (mm)1 | ЁР0.02 | ||
| ЖЏзїЗЖЮЇ (Ёу) | ЪжБла§зЊ (JT1) | ЁР180 | |
| ЪжБлЧАКѓ (JT2) | +135 - ?80 | ||
| ЪжБлЩЯЯТ (JT3) | +118- ?172 | ||
| ЪжЭѓа§зЊ (JT4) | ЁР360 | ||
| ЪжЭѓЭфЧњ (JT5) | ЁР145 | ||
| ЪжЭѓХЄзЊ (JT6) | ЁР360 | ||
| *ДѓЫйЖШ (Ёу/s) | ЪжБла§зЊ (JT1) | 360 | |
| ЪжБлЧАКѓ (JT2) | 360 | ||
| ЪжБлЩЯЯТ (JT3) | 410 | ||
| ЪжЭѓа§зЊ (JT4) | 460 | ||
| ЪжЭѓЭфЧњ (JT5) | 460 | ||
| ЪжЭѓХЄзЊ (JT6) | 740 | ||
| дЪаэИКдиХЄОи (N?m) | ЪжЭѓа§зЊ (JT4) | 12.3 | |
| ЪжЭѓЭфЧњ (JT5) | 12.3 | ||
| ЪжЭѓХЄзЊ (JT6) | 7 | ||
| дЪаэИКдиЙпСП (kg?m2) | ЪжЭѓа§зЊ (JT4) | 0.4 | |
| ЪжЭѓЭфЧњ (JT5) | 0.4 | ||
| ЪжЭѓХЄзЊ (JT6) | 0.12 | ||
| жиСП (kg) | 34 | ||
| АВзАЗНЪН | ЕиУц, аќЙв | ||
| АВзАЬѕМў | ЛЗОГЮТЖШ (ЁуC) | 0 - 45 | |
| ЯрЖдЪЊЖШ (%) | 35 - 85 (ЮоНсТЖ) | ||
| ПижЦЙё / ЫљашЕчдД (kVA) | F60/ 2.0 | ||
| БЃЛЄЕШМЖ | ЪжЭѓ: IP67ЭЌЕШЁЁЛљзљ: IP65ЭЌЕШ | ||









