

 联系我们
联系我们

扁线电机,是定子绕组中采用扁铜线,先把绕组做成类似发卡一样的形状,穿进定子槽内,再在另外一端把发卡的端部焊接起来。
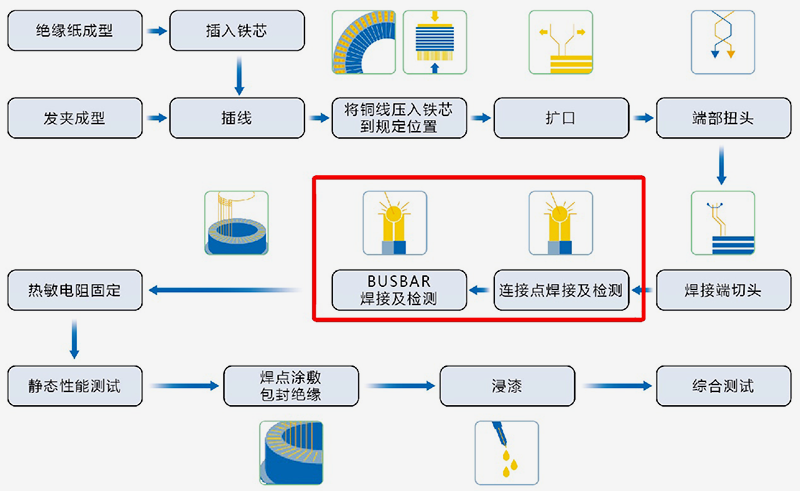
目前常规的8层扁线电机,总体的工艺流程:一、切头,完成后进入焊接工位;二、视觉引导,通过视觉确定具体的焊接位置;三、激光焊接,通过激光头,对锁定的位置进行***焊接;四、焊点检测,***终,再通过视觉对焊点进行品质测量。
课题
1、平均每台电机焊接耗时>3min
由于激光焊接设备的成本是TIG焊接设备成本的5至10倍,因而仅考虑采用单台激光来完成,随之而来的问题是,焊点数量多,单台激光焊接的整体时间冗长。我们拿当前主流的8层Hairpin电机举例,每台电机的发夹数量约200pcs,理想状况下总焊接完成时间大于3min。
1)焊接动作耗时约2min
按照0.5s/焊点的节拍来计算:200pcs * 0.5s/pcs=100s,也就是说,要接近2min/台。
2)振镜运动耗时约40s
单振镜的情况下,需要电机做位置移动,以便于激光头能够覆盖至每个焊点。按照移动每个点0.2s计算:200pcs * 0.2s/pcs=40s,也就是说,整个振镜运动时间,要高达40s。
3)无同步运动控制功能,移动耗时约48s
振镜和电机的运动为逻辑运动,会有间歇停顿时间,按照48槽,每个槽1s的时间来计算:48pcs * 1s/pcs=48s,也就是说,整个移动时长,要长达48s。
解决方案
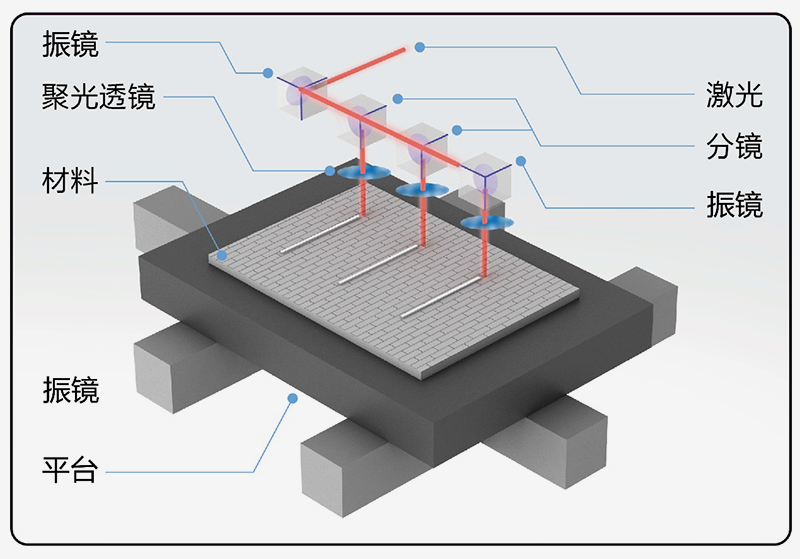
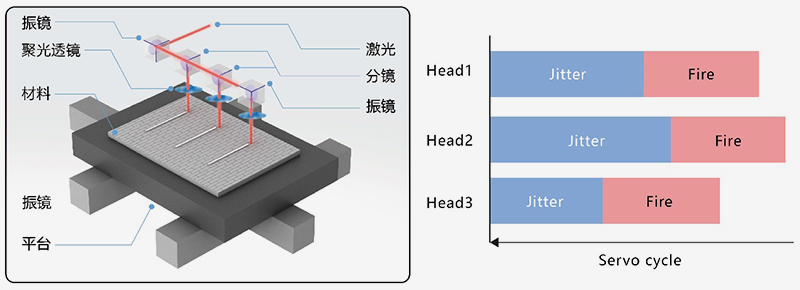
1、分裂激光束,将四个激光头共用一个激光光源
- FROM
- 一个激光光源,对应一个激光头
- TO
- 一个激光光源,对应四个激光头
整体的成本下降为之前的四分之一。
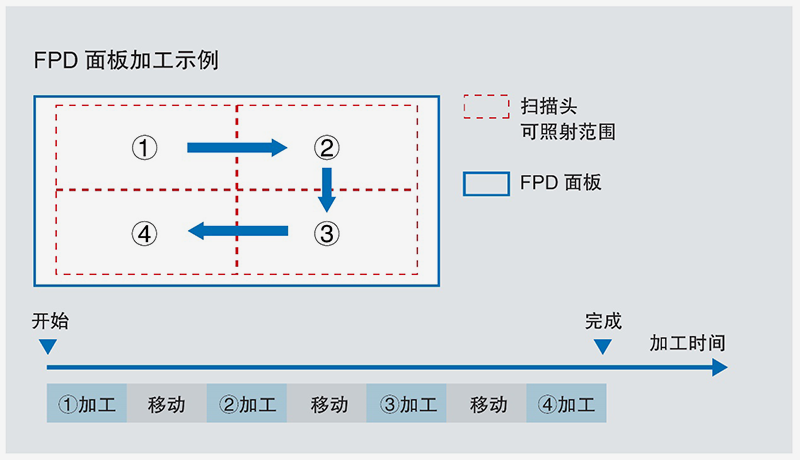
2、振镜激光与工作台同步联动,提升设备产能
以往,工作台停下后才可以加工,移动期间无法同时加工,待机时间导致产能下降。
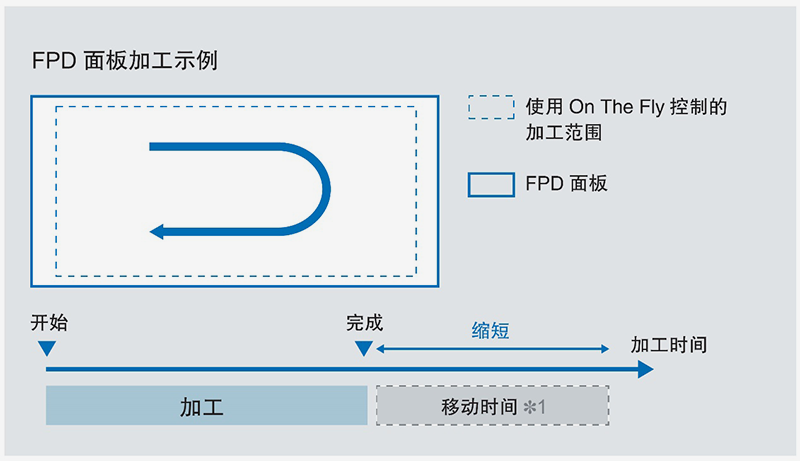
现在,欧姆龙的运动控制器采用On The Fly控制方式,可以在工作台移动的同时进行激光加工。因此,相比工作台移动中无法同时加工的传统方式,可以消除以往工作台移动中的待机时间,从而令产能提高约35%。
3、同步运动控制,减少电机单独移动时间
由于控制器内的偏差,加工时机也不同,因此我们把控每个激光头的加工时间,与移栽机构进行高精度的同步控制。
控制系统
■ 可编程多轴运动控制器CK系列
实现价值
1、速度:以主流的8层Hairpin电机为例,每台电机发夹数量约为200pcs,原来完成所有点的焊接用时>3min,现在用时<2min,***快98s完成。
2、成本:相比原系统,现方案成本降低为1/4
【经营层】
■ 通过对前沿运动控制技术的引入,使产品本身设计和制造工艺上得到历史性的突破,可适用于大批量**率的生产需求,进一步巩固自身**品牌的地位。
【管理层】
■ 通过分裂激光束,多激光头共享同光源来提升产能,将成本降低为原系统的1/4。
■ 通过多激光头与移栽机构的同步运动控制,大幅提升了设备的性能指标与自动化水平。
■ 通过多激光头与移栽机构的同步运动控制,大幅提升了设备的性能指标与自动化水平。
【工程师层】
■ 仅需设定激光ON/OFF时机的目标值,大幅缩短设备的引入时间。
■ 欧姆龙工程师全程参与指导,后期项目调整,只需自行修改参数即可。
■ 欧姆龙工程师全程参与指导,后期项目调整,只需自行修改参数即可。
