联系我们
联系我们

ND9000是系列代号,对于ND9102H来说,“9”指的是ND9000系列,“10”指的是外壳安全级别为“Standard IP66/NEMA 4×”,“2”指的是小流通量,“H”指的是支持HART通讯协议和所定义的输入信号范围(4-20mA);具体如下图:
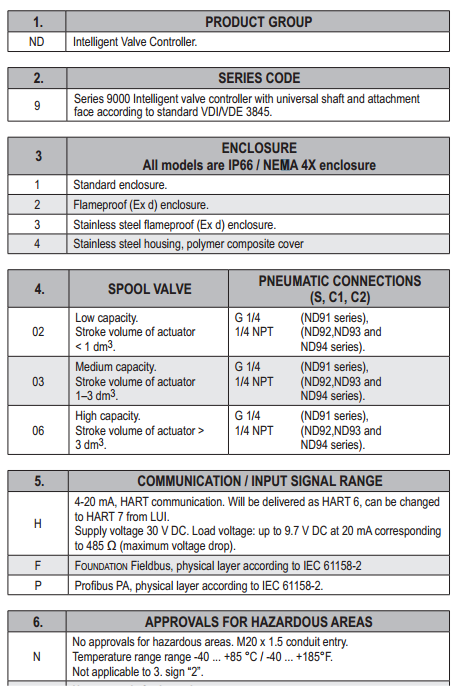

ND9000系列是一种基于微处理器技术的智能阀门控制器,采用4-20mA的供电回路,使用HART手操器操作设备时支持***低3.6mA输入信号。就地操作可以使用控制器的本地用户界面,远程操作需要一台安装有软件的电脑,且须连接到ND9100H本体或控制回路中。
阀位由功能强大的32位微处理器控制,相关的测量参数有输入信号、带无触点传感器的阀位、执行器压力(2个独立的测量值)、气源压力、滑阀(spool valve)、设备温度。
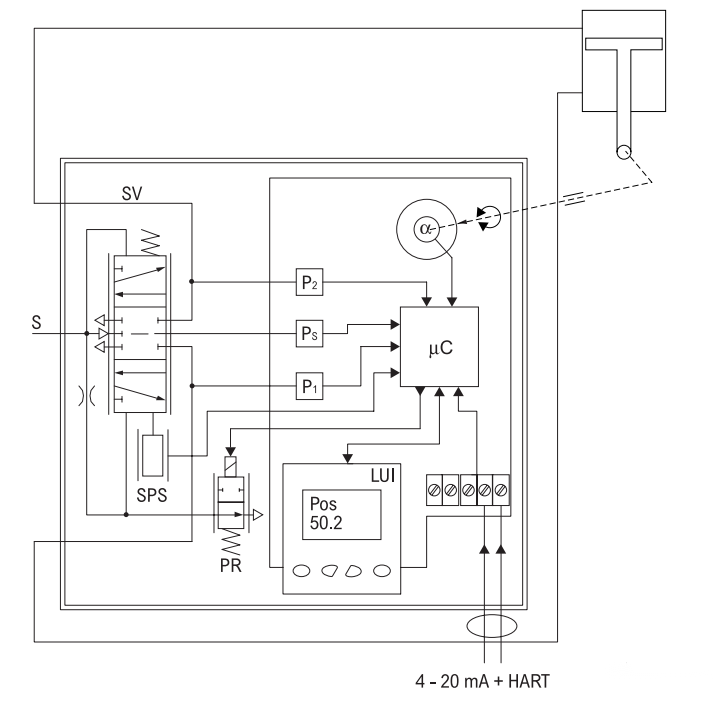
**的自诊断技术保证全部测量功能正常工作。当输入信号和阀位测量均正常时,其它任意测量的失灵不会导致阀门失灵。电气信号连接和到气缸的气源连接完成之后,微处理器(μC,参看图3-1,下同)读取输入信号、位置传感器测量值(α)、压力传感器测量值(Ps、P1、P2)和滑位传感器测量值(SPS)。嵌入μC中的控制算法检测到输入信号与α发生偏差后,以分别来自输入信号和传感器的数据为依据,计算一个新值并送入前置级(PR)线圈电路。改变输入到PR的电流相应改变通向滑阀的控制压力。减小了的控制压力使滑阀阀芯产生位移,相应地改变了执行器的压力。阀芯开启后,气体流向双薄膜执行器的驱动侧,并从执行器另一侧排出。逐渐增大的压力就会使薄膜产生位移,驱动执行器和反馈杆或轴顺时针旋转。位置传感器(α)测量旋转量并送到μC中。运用控制算法,μC开始调整PR中的电流,从一种稳态开始,直到产生的新值使得执行器状态达到输入信号值应对应的状态为止。下图是定位器工作原理图

本地用户界面功能:
?阀门的本地控制
?监控阀门位置,输入信号,温度,供应和执行器压力差
?引导启动功能
?LUI(本地用户界面)可远程锁定,以防止未经**的访问
?校准:自动/手动/线性化
?1点校准
?控制配置:积极,快速,***佳,稳定,***大稳定性
?模式选择:自动/手动
?旋转:阀门顺时针或逆时针旋转关闭
?死角
?低截止,截止安全范围(默认2%)
?定位器故障动作,打开/关闭
?信号方向:直接/反向作用
?执行器类型,双/单作用
?HART版本:HART 6或HART 7
?阀门类型,旋转/线性IEC/nelesCV Globe/FLI
?语言选择:英语,德语和法语
ND9000H阀门定位器所需维护取决于工作环境及条件,如气源质量等因素,正常工况下无需维护。
检修ND9000H前,确保气源已断开且压力业已释放。ND9000H阀门控制器包括以下可换模块,分别是前置级单元、带传感器的滑阀组件单元、带可选择位置变送器的通讯电板。这些模块被固定在盖壳之下,如果某个模块发生故障导致失灵,就必须更换新模块,且需在清洁干燥的环境中进行装配。重新装配后,把螺丝涂上防松螺纹油,并牢牢地紧固。
a. 前置单元
前置单元拆除要十分小心,尤其当去掉外壳后,拆下来的部分不能乱动。用螺丝刀卸下M4螺丝,移开前置单元。从滑位传感器电路板上拔掉前置级接线,继续卸掉滑阀盖上的两个M4螺丝,竖直的取出前置单元模块,***后移开O型环。安装时,放置一个新O型环到滑阀凹槽,再把前置单元放入。确认喷嘴是否正好导入O型环。利用螺丝使前置级本体恢复到正确的位置,均匀地紧固螺丝。重新把前置单元双极电缆连接器插入滑位传感器电路板,连接器具有防插错功能。***后盖上前置单元外壳并紧固螺丝。
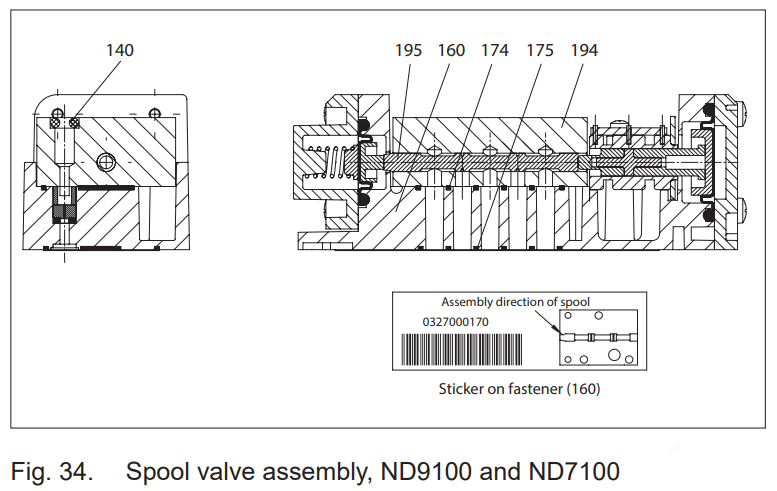
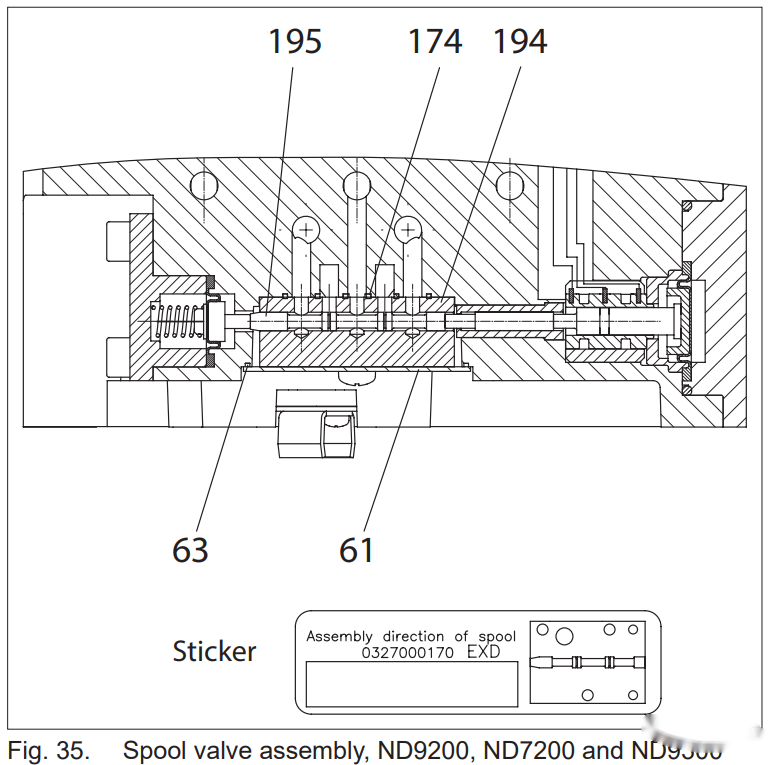
b. 滑阀组件
移除滑阀只能在拆除前置级之后进行。卸掉三个M4螺丝和两个M3螺丝,移除滑阀组件。若有必要,按照对环境清洁度的要求和适当的步骤对滑阀进行清洁。卸掉三个M4螺丝后,竖直地把滑阀从固定槽中取出,用手指拿紧阀体末端以防止阀芯脱落。小心地清洁阀芯和阀体中孔,注意不要让洁具纤维粘到阀芯和阀体中孔上,也不要划伤阀芯和阀体的结合处。节气门安装在固定槽中滑阀之下,移除滑阀后也要对之清洁。注意,每个滑阀本体对应于***的阀芯,故不能互换阀芯,也不能改变阀芯的方向(如图3-6右下角所标识)。
重新装配时,确认在滑阀组件底部凹槽中衬垫是否放置得当。把滑阀装入固定槽,紧固三个M4螺丝和两个M3螺丝。确认O型环与凹槽内部完全接触,***后按照上述步骤直接安装上前置级单元。


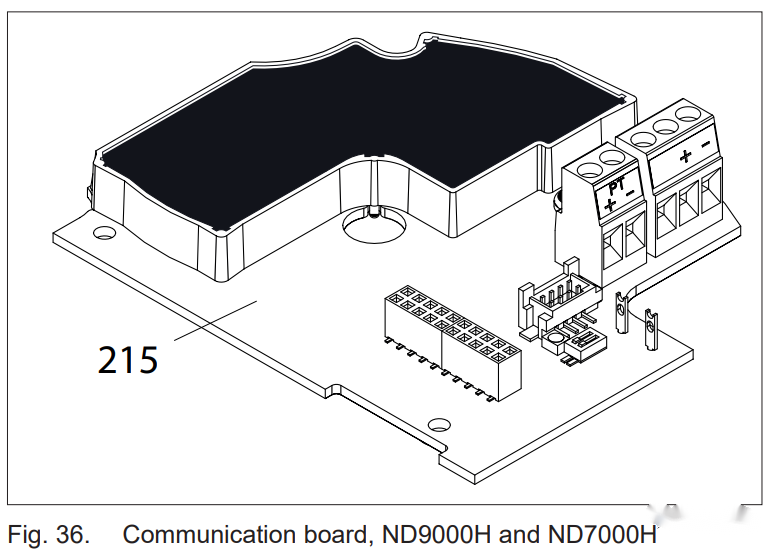
c. 通讯电路板
松开位置指示器上的M8埋头螺丝,并从轴杆上卸下位置指示器。移除前置级外壳,进一步移除由4个M3螺丝固定的电路板盖子。注意在接触电路板之前先要释放自身静电。卸掉4个M3固定螺丝,拿住一边将电路板竖直向上拿出来。小心处理电路板,***好只接触电板边缘。重新安装的步骤与上述相反。图3-7所示为通讯电路板的外形图。