
 产品:19
产品:19
 联系我们
联系我们

版权归原作者,侵删。

一、负载测试方法:
1.安装Load Data Determination负载测试软件,更改示教器语言为英文,在负载测试过程中只识别英文、德文及日文,不识别中文。
2.将机器人开到合适位置,将2、3 轴打到正负90 度,4、5、6成0度后开始下一步。
3.点击Start up选择Service,选择Load Data Determination。
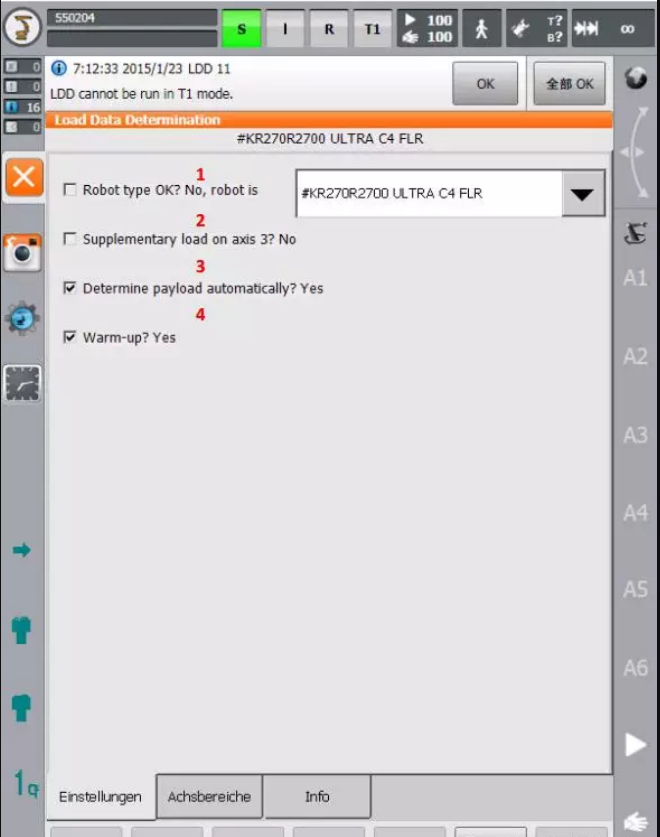
4.点击该选项后,出现如下所示的页面,分别代表的意思为 1 选择对应机器人型号,2 保存当前位置,3 输入负载估计重量,4 预热启动。
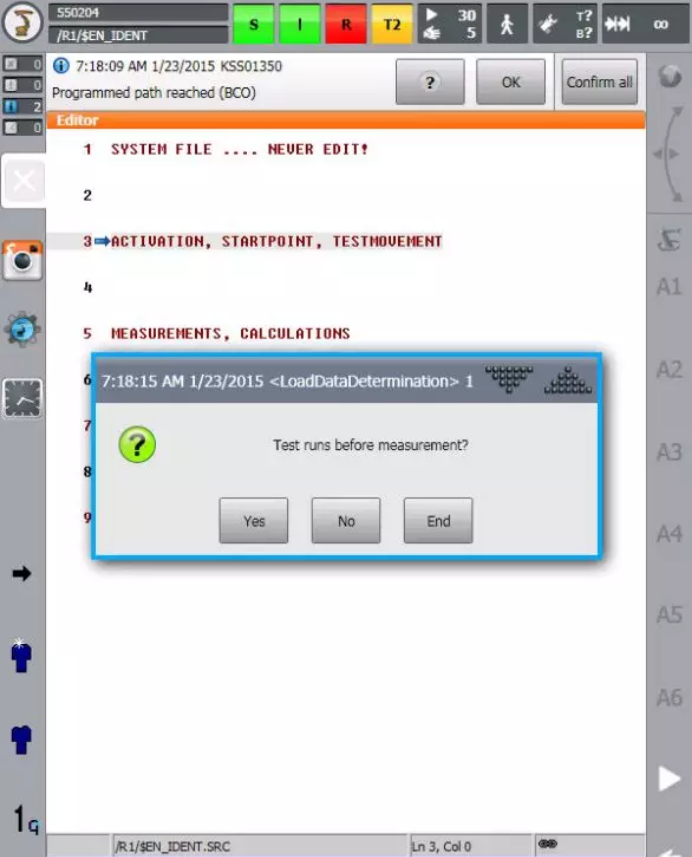
5.将机器人打到T2 或内部自动模式,开始,然后点击Start自动进入负载测试程序,如下图所示。
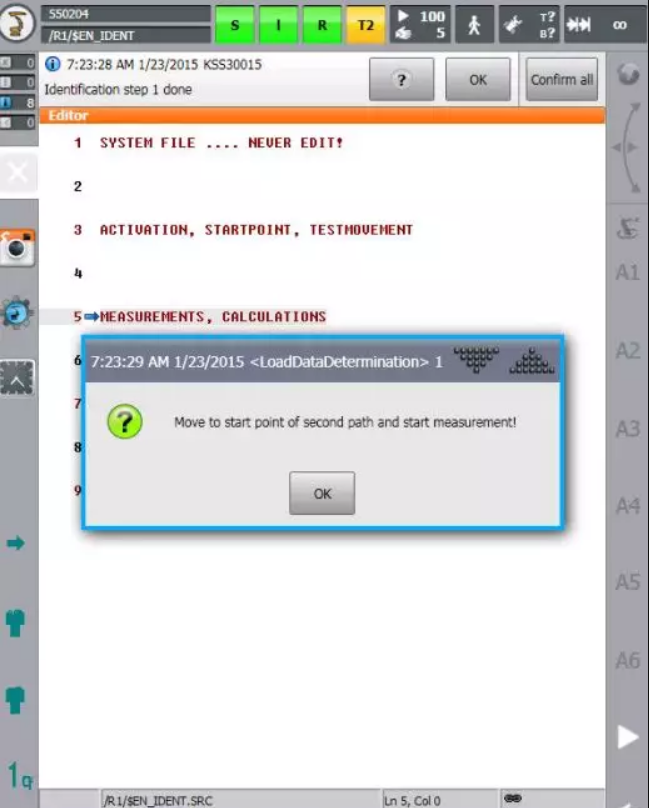
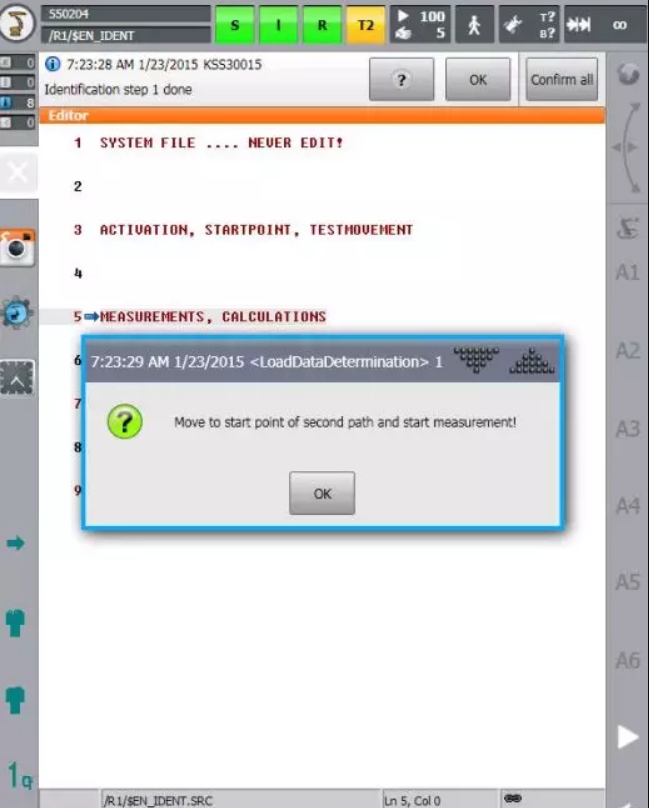
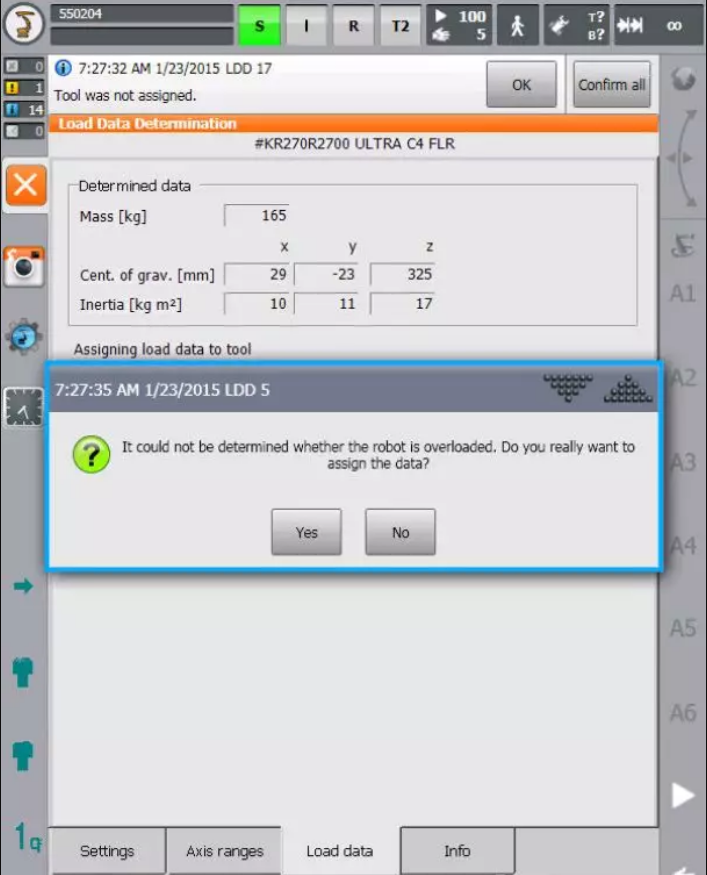
6.一直点击Yes,机器人自动进行程序运行,机器人速度会自动改变,5轴在正负60度,6轴在正负90 度内摆动,每做完一项会有提示信息,如下图所示。
7.完成后点击激活工具,备份,点击YES将所做负载录入到工具数据中。
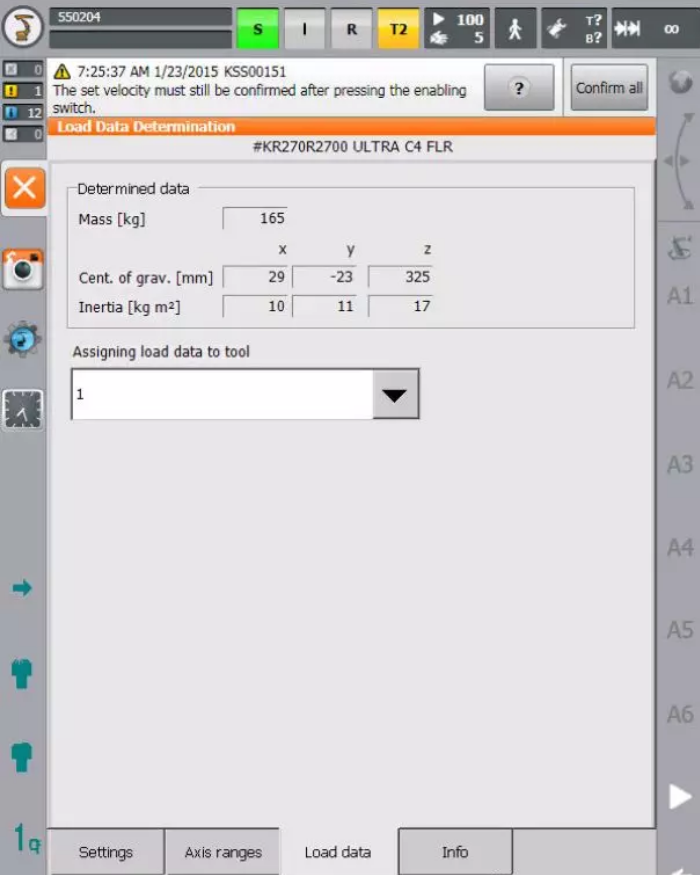
8进入工具负荷数据,检查当前负载数据有没有被分配到工具号中去(此时也可手动输入数据)保存。到此负载测试完成。
二、KUKA 库卡机器人:零点校正时负载如何处理
当机器人加装工具等负载后,由于减速机刚性较弱以及齿轮传动间隙等因素,机器人轴会在重力作用下出现下沉现象。
因此,负载会影响机器人的零点校正。那么,零点校正时负载如何处理?需要事先拆卸吗?
零点校正时负载如何处理?
零点校正时,不需要也不建议拆卸负载工具;否则,拆装工具后TCP可能还要重新校准。
实际操作中,可以在机器人工具安装完毕之后,再进行零点校正工作。但以后重新校正零点或检查零点时,均需装载这一工具。如果把工具拆下了,机器人受力减少,轴会反弹回去,零点反而和装载着工具的时候出现差异了。
所以,零点校正时机器人负载状态需要保持一致。
举例来讲:
A机器人首次使用时是空载校零的,那以后零点校正时均需保持空载;
B机器人首次使用时是带着一个工具校零的,那以后零点校正时均需装上此工具。
C机器人工作时会用到三个不同重量的工具:Tool1、Tool2、Tool3,零点校正时又该如何操作呢?
此时,空载校零虽说可以达到预期目的,但操作上比较麻烦:每次重新校正零点或检查零点时必须拆下工具,这增加了操作员的工作量。
为了避免上述麻烦,还有另一套解决方案:
带负载校正,让操作更便捷
KUKA 系统中“带负载校正”的零点校正方案,巧妙解决了三个工具重量不同的这一问题。
操作步骤
1、首先,机器人保持空载,进入“首次调整”功能进行零点校正。(如果有类似换***盘等重量较轻的工具也可以安装好后进行“首次调整”。)

2、 依次安装每个工具,分别进入“偏量学习”,并按照提示点击每个轴进行“学习”。(每个工具需分别进行一次6个轴的偏量学习。)
完成以上两步,便完成了零点校正。
注意: “精度机器人(有PID文件的机器人)”必须采用空载校零,或者带着工具的采用“带负载校正”方案进行校零操作,否则会影响其精度。
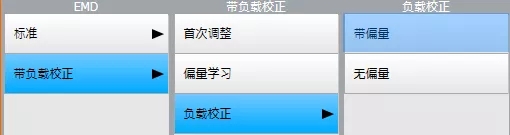
通过“带负载校正”方案进行零点校正的机器人,在后期维护中需要重新校正零点或者检查零点时,便可装载接受偏量学习“训练”后的任何工具,进入“负载校正——带偏量 ”模式,进行重新校零或检查零点。
注意事项
(1)采用“带偏量”功能校正零点或检查零点时,系统会自动剔除因工具重力产生的偏量值,确保与空载校零时的负载状态一致。
(2)“无偏量”功能,仅适用于人为误删零点或电气原因(譬如RDC卡故障、突然断电)导致零点丢失的情况下恢复原有的零点校正值,而不允许用于更换电机、齿轮箱或机械拆装等情况。
送大家一张 EMD 校正零点的方法总结图。

1
工博士可以提供了ABB,库卡,安川,发那科和欧地希等各种品牌机器人和常用机器人型号,并且包括机器人的配件,保养,维修,培训等等服务我们都可以进行服务,真正做到了为客户进行一站式的服务保障,并且工博士现已经是集九大机器人代理品牌于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。
了解机器人更多信息可点击咨询: 库卡机器人保养 服务商
更多库卡机器人保养、库卡机器人维修可点击咨询: http://kuka-jqrbaoyang.m.eepottsltd.com/