

 QQ
QQ

技术参数
型号 |
RB20 |
||
自由度 |
6 |
||
驱动方式 |
交流伺服驱动 |
||
有效负载(kg) |
20 |
||
重复定位精度(mm) |
±0.05 |
||
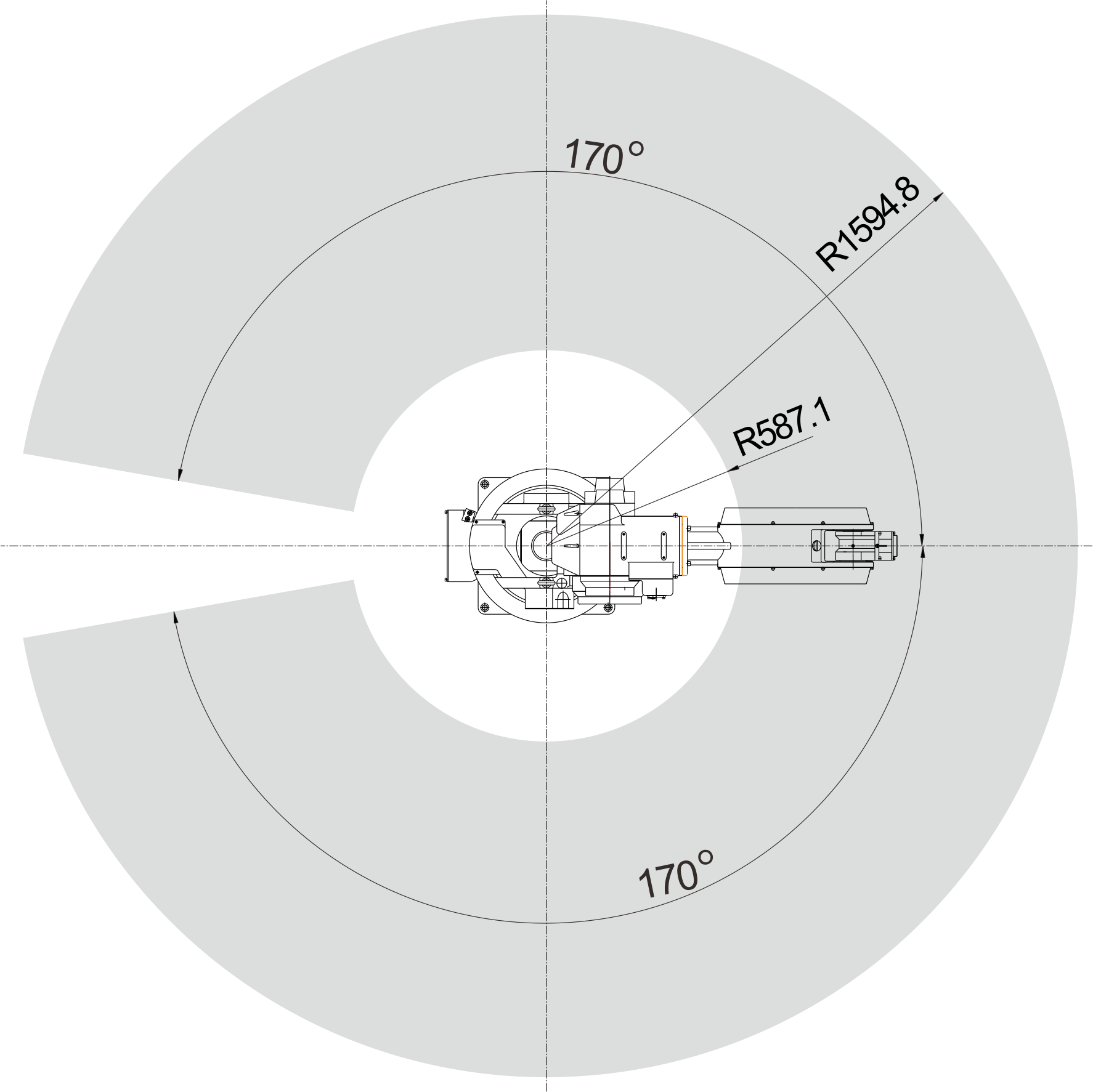
运动范围(°) |
J1 |
±170 |
|
J2 |
+132~-95 |
||
J3 |
+73~-163 |
||
J4 |
±180 |
||
J5 |
±133 |
||
J6 |
±360 |
||
***大速度(°/s) |
J1 |
163 |
|
J2 |
111 |
||
J3 |
125 |
||
J4 |
300 |
||
J5 |
198 |
||
J6 |
394 |
||
允许***大扭矩 (N.m) |
J4 |
40 |
|
J5 |
50 |
||
J6 |
22 |
||
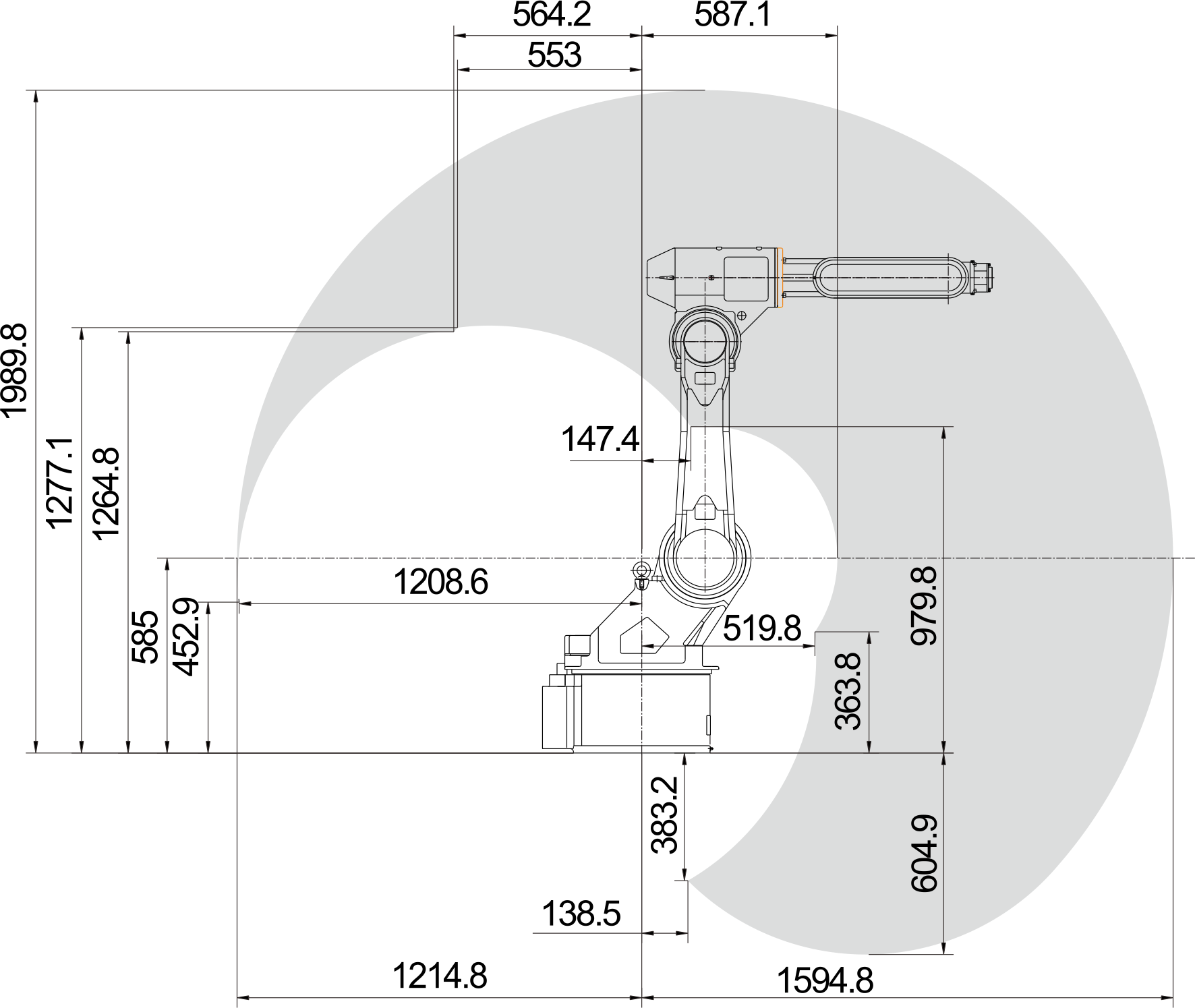
运动半径(mm) |
1595 |
||
本体重量(kg) |
290 |
||
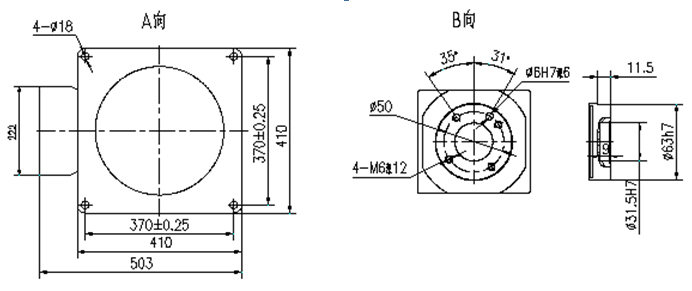
安装尺寸
应用领域
广泛应用于物流搬运、机床上下料、冲压自动化、装配、打磨、抛光等。
运动范围
了解更多请点击:广数机器人服务商
