

 QQ
QQ
3方案设计
3.1系统框图设计
机器人通过机器人接口与三菱FX2N-32MR-D PLC之间传送信息,通过传感器、示教器、按钮气缸气爪以及一些基本的电路回路将华数工业机器与三菱FX2N-32MR-D PLC很好的结合在一起,组成了众多站中的搬运站,系统框图设计如图4所示。
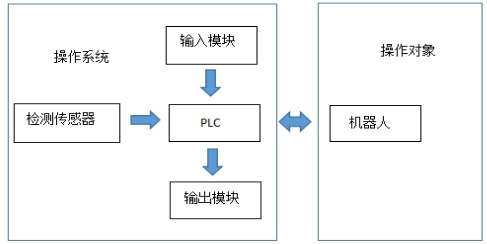
图4系统框图
3.3PLC的I/O接口设置
三菱FX2N-32MR-D PLC输出输入根据搬运站中实际要求设置,三菱FX2N-32MR-D PLC如表2所示。
表2PLC的I/O接口设置

4程序设计
广数工业机器人指令有运动指令、信号处理指令、流程控制指令和运算平移指令。根据机器人需要运动的轨迹编出合适的程序。
程序如下:
MAIN;主程序
//PX0=PX0-PX0;数据清零
//LAB1;标签1
SET B0,0;***行***个置位
SET B1,0; 第二行***个置位
SET B2,0; 第三行***个置位
PX1=PX1-PX1; 数据清零
SETE PX2(1),100; ***行***个赋值y轴100mm
SETE PX3(2),100; 第二行***个赋值x轴100mm
SETE PX4(1),200; 第二行第三个赋值x轴200mm
LAB0; 标签0
MOVJ P1,V30,Z0;//物体以百分之30速度,Z0精度运行到p1;
DOUT OT1 OFF;末端执行器抓取物体
DELAY T1;延时一秒
MOVL P2,V30,Z0;//物体
SHIFTON PX1;平移开始
MOVJ P3,V30,Z0; 物体以百分之30速度,Z0精度运行到p3;
MOVL P3,V30,Z0; 物体以百分之30mm速度,Z0精度运行到p3;
SHIFTOFF ;平移结束
MOVL P4,V30,Z0;//搬运到达1点
DELAY T1;延时一秒
DOUT OT1,ON;//释放
Px4=px1+px3;第三行***个等于***行***个加第二行***个相加
INC B0;B0自加一
JUMP LAB0,IF B0<4;//每行放4个
SET B0,0;//第二行初始化
Px1=px1-px1;
Px1=px1+px2;
JUMP LAB0 IF B1<2;跳转
SET B1,0;//第三行初始化
PX1=PX1-PX1;
PX1=PX1+PX4;
INC B2;自加一
JUMP LAB0 IF B2<2;跳转
END;结束
本文摘取网络(侵 删)
了解更多请点击:广数机器人服务商
