

 QQ
QQ
机器人的身体电池由4块1.5V锂电池组成,放置在机器人的底座内部。正常的更换周期是一年。电池电源由两个电路提供,一个是机器人六轴伺服电机编码器,另一个是伺服焊***编码器。电池的异常耗电量可初步判断为两路供电线路中的一条或两条同时并联地传导,导致机体电池的异常耗电量。当故障导致焊***零点丢失时,焊***零点需要重新校准。当机器人的六轴零点丢失时,需要重新校准机器人的六轴机械零点,并对所有车型的运动轨迹程序进行演示和验证,这将对项目的调试和生产产生很大的影响。

1. 机器人正常使用时,机器人身体电池在短时间内非正常消耗,导致伺服焊***零点和机器人六轴零点丢失。机器人报警代码为SR-VO-062/ sr -065
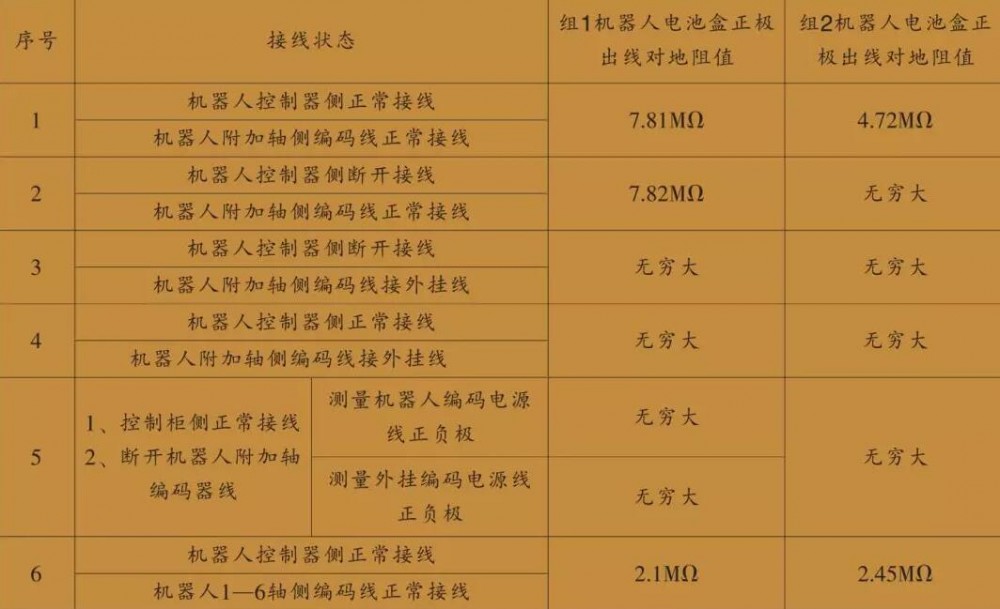
根据Fanuc机器人内部电路的电气图纸,采用比较法对十组机器人编码电路的地对地测试数据进行了测试。***组是一个有故障的机器人,它的编码电池在两个月的快速消耗后完全耗尽。第2组为正常机器人,与故障机器人同批次购买,工作状态与第1组机器人相似,作为测试结果的参考对象。在本次实验中,用于对比验证的插拔轴编码线正常运行,实验结果记录如下:
资料来源:网络
3. 分析与经验总结通过比较测量的结果, 可知在机器人控制器侧断开接线, 机器人附加轴侧编码线正常接线时, 机器人电池盒正极出线对地有电阻, 表明机器人编码回路存在分流现象, 即可锁定故障点为焊***编码器电路, 根据机器人内部电路组成情况, 判定问题点出现在焊***编码器或者焊***编码线缆部分;当遇到机器人本体电池异常消耗故障时, 首先还是进行线缆磨损、 电缆接头松动等常规检查与排除方法, 在思路不明确的情况下, 采用以上实验方法进行***排除, 可有效解决此类问题。
转载:机器人在线
更多:发那科beplay网站入口
