

 联系我们
联系我们






对于ABB工业机器人,传统的标定方法有:
1.手动标定;
2.水平仪标定;
3.轴标定;
4.传感器标定;
***精度(603-1:Absolute Accuracy)是另一种标定的概念,它能让机器人在其整个工作范围内将TCP的精度保持在1mm之内。
这里需要说明的是,1mm指的是极糟糕的情况,就个人经验来看,实际TCP重定位精度基本都能被控制在 0.2mm 以下,纯粹的fine的点效果更好。
·何时使用***精度?
在某些情况下,客户想互换机器人而不想修改现有的程序点位,或者他们在线上仿真后不想再在线下去做太多修改,但是由于物料制造及机械组装而产生的累计误差,实际的机械与理想中的模型会有大至数毫米的差别,由于不会有两个精度一模一样的机器人,大幅度的点位修改在所难免。而***精度则会将机械上的偏差补偿掉,使机器人的实际情况尽可能地接近理想模型。从而减少很多工作量。
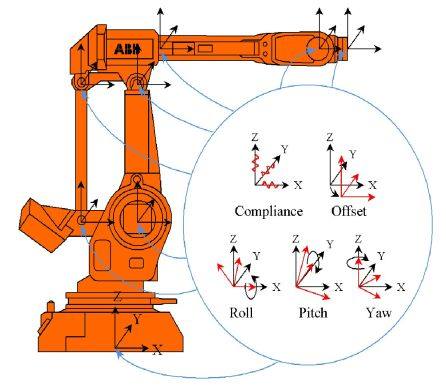
每个轴的偏差的来源多种多样
而通常情况下,***精度会被使用在要求精度非常高的应用中。
以下情况下***精度会激活:
基于 robtarget 的任何运动和点位修改,比如 MoveL等;
重定位旋转;
直线移动;
工具定义;
工件坐标系定义;
***精度的局限性?
***精度仅作用于笛卡尔坐标系,而非机器人关节,所以是不会改善类似于MoveAbsJ的关节运动。
对于倒挂的机器人,***精度必须在机器人倒挂的时候做。
部分机器人,比如IRB 120,无法使用该选项。
以下情况下***精度不会激活:
基于 jointtarget 的运动(MoveAbsj);
独立轴;
转轴运动;
外轴;
导轨运动;
***精度如何开启?
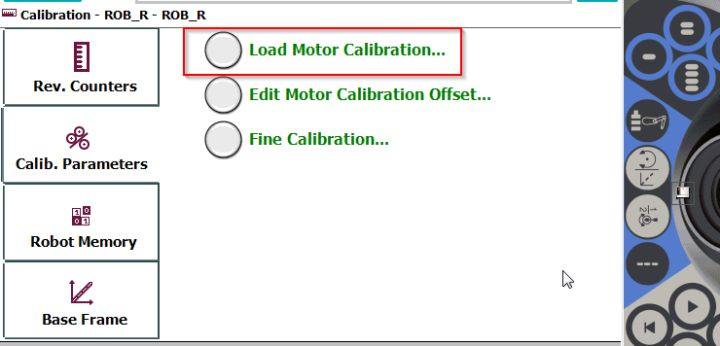
第 一步:进入标定参数界面,选择参数导入:
第二步:导入配置参数;
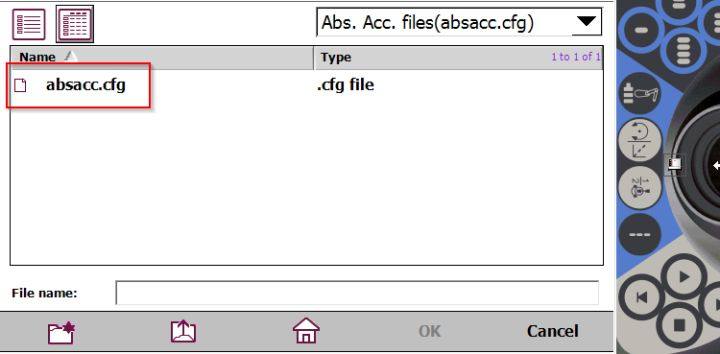
没配置文件的话,第四步中开启了也没用
第三步:进入控制面板Motion-->Robot
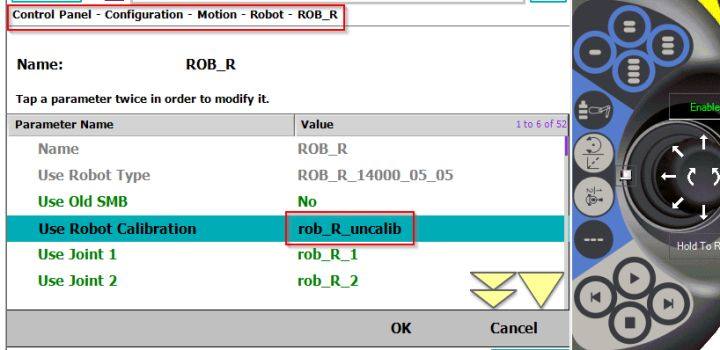
uncalib 的意思就是没有开启
第四步:开启***精度选项

然后就可以在Jogging界面看到开启的状体了 :D
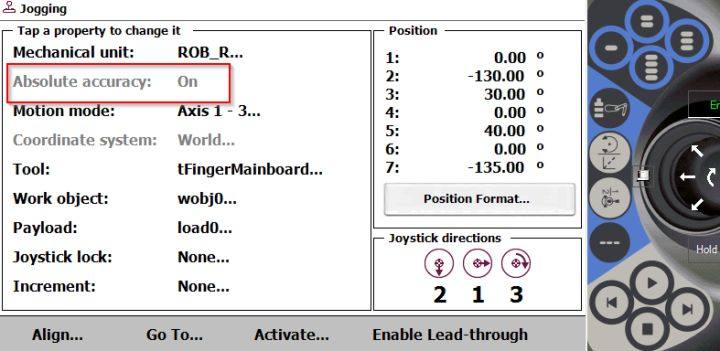
如果是Off 状态,AbsAcc 无效
