
 产品:125
产品:125
 联系我们
联系我们

1.程序模块
1.程序模块 程序模块(Program module)是机器人作业程序的主体,它包含了机器人作业所需的各种程序,程序模块的基本组成和结构如下。




程序模块(程序模块)是机器人作业程序的主体,它包含了机器人作业所需的各种程序,程序模块的基本组成和结构如下。
标题。标题( Header)是应用程序的简要说明文本,它可根据实际需要添加,不作强制性要求。标题痈写
在RAFID 程序文件的起―T百t的标畅通常为程序版始、结束标记。ABB机器人程序文件的标1^赣后本( Version)、显示语言( Language)等说明。标题之后
为组成应用程序的各种模块和程序。
注释。注释(comment)是为了方便程序i阅读所附加的说明文本,注释以符号「!」(程序指令COMMEHT的简写〉作为起始标记,以换行符结束。在ABB机器人中,有时以注释行「!******」来分隔程序模块。
指令。指令《 工nstruction是系统的全制BLRS它用来定义系统需要执行的操作,如指令「 PERS
tooldata t MIG1 :—"""""!用米炬又3:-…上用来定t MIG1∶指令「VAR speeddata vrapid :=……"」用来定
义机器人的移动速度数据vrapid等。
标识。标识(Identifier〉就是构成程序的元素名称,它是程序元素的识别标记。如指令「PERStooldata t MIG1 :—……-」中的t MIG1,就是特定作业工具的标识〈工具数据tooldata ),指令「 VARspeeddata vrapid :="-"…"」中的vrapid,就是机器人特定移动速度的标识〈速度数据speeddata)等。
在RAPID程序中,不同的模块、程序、程序数据、参数等都需要通过标识区分,因此,在同—控制系统中,不同的程序元素原则上不可使用同样的标识,也不能仅仅通过字母的大小写来区分不同的程序元素。
RAFID程序的标识需要用ISo 8859-1标准字符编
写,***多不能超过32个字符:标识的首字符必须为英文字母,后续的字符可为字母、数字或下划线「_」3但不能
使用空格及已被系统定义为指令﹑函数、属性等名称的系统专用标识《称保留字)。
此外,还有许多系统专用的名称,如指令名( Accset 、 Movej 、Confj等)、函数命令名(bs 、 sin .ffs等)、数据类型名( num 、 bool 、 inout等)、程序数据类别名(robtarget 、 tooldata 、 speeddata 、 pos等)、系统预定义的程序数据名〈v100、 z20、vmax 、 fine等)等,均不能作为其他程序元素的标识。
此外,还有许多系统专用的名称,如指令名(Accset、Movej、Confj等)、函数命令名)(bs、sin.ffs等)、数据类型名(num、bool、inOut等)、程序数据类别名)) 如果需要,可以通过程序中的 RAPID函数命令(见后述),对程序模块的名称、编辑时间等信息进行检查和确认。

如果需要,可以通过程序中的快速函数命令(见后述),对程序模块的名称、编辑时间等信息进行检查和确认。 ⒉系统模块
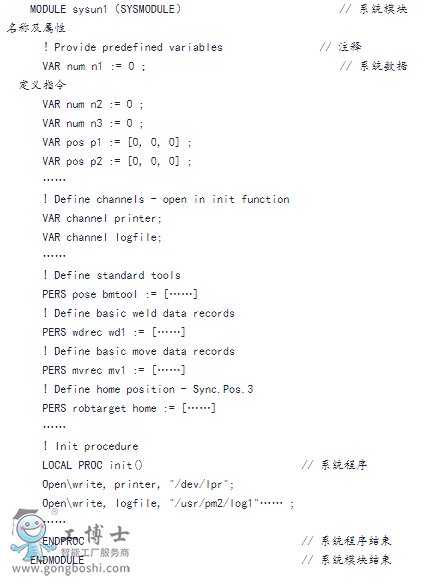
2系统模块 系统模块( System module)用来定义机器人的系统参数和功能,其基本格式如下。由于系统模块需要由机器人生产厂家编制,它通常与用户编程无关,本书不再对其进行进一步的说明。
系统模块(系统模块)用来定义机器人的系统参数和功能,其基本格式如下。由于系统模块需要由机器人生产厂家编制,它通常与用户编程无关,本书不再对其进行进一步的说明。

更多ABBbeplay网站入口 资讯欢迎点击咨询
:ABBbeplay网站入口